

































基于虚拟化技术的边缘计算方案应用
175
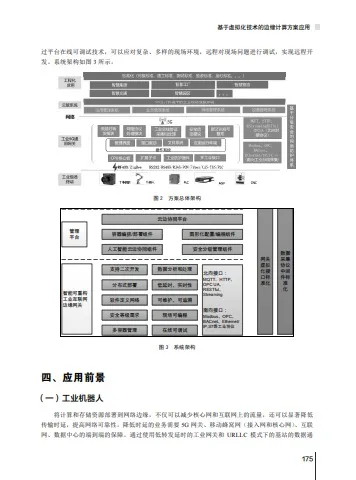
过平台在线可调试技术,可以应对复杂、多样的现场环境,远程对现场问题进行调试,实现远程开
发。系统架构如图 3 所示。
图 2 方案总体架构
管理
平台
云边协同平台
支持二次开发
图形化配置/编程组件
人工智能云边协同组件 安全分级管理组件
智能可重构
工业互联网
边缘网关
分布式部署
软件定义网络
安全等级需求
多容器管理
数据分析和处理
低延时、实时性
可维护、可追溯
现场可编程
在线可调试
北向接口:
MQTT、HTTP、
OPC UA、
RESTful、
Streaming
南向接口:
Modbus、OPC、
BACnet、Ethernet/
IP,S7等工业协议
容器编排/部署组件
网关
虚拟
化接
口标
准化
数据
采集
协议
中间
件标
准
化
图 3 系统架构
四、应用前景
(一)工业机器人
将计算和存储资源部署到网络边缘,不仅可以减少核心网和互联网上的流量,还可以显著降低
传输时延,提高网络可靠性。降低时延的业务需要 5G 网关、移动蜂窝网(接入网和核心网)、互联
网、数据中心的端到端的保障。通过使用低转发延时的工业网关和 URLLC 模式下的基站的数据通
智能交通产品与技术应用汇编
176
路延时可以达到 5 毫秒。在 5G 中,其核心网引入了分布式网关,网关可以下沉到基站附近,边缘
服务器可以直接连接到分布式 MEC 网关上,大大降低网络的端到端时延。边缘计算的引入将解决
终端能力受限和云计算的实时响应的问题,增强机器人云端大脑的 实时响应能力,对于满足机器人
4.0 的要求十分关键,比如实时的推理、场景理解、操控等等。同时将大部分机器人的智能布署在
边缘和云端,通过协作和不断的训练,持续不断的提高机器人智能,比如通过边缘计算能更好的支
持实时的多机协作,支持实时的知识图谱提取、理解和决策,持续不断的提高机器人的智能。边缘
计算和云计算还可以解决机器人终端升级维护的困难,在机器人本体的生命周期内不断升级,提高
机器人的能力,增强数据安全和隐私保护,充分利用摩尔定律带来的性能提升。
工业现场不同的工业机器人控制器控制协议不一致,通过工业 5G 通用网关中启用不同的控制
器的协议模块,来控制现场的工业机器人。通过使用 5G 网关上的规则引擎,区分数据的处理路径。
基于生产环境的实时数据和边缘计算,实现设备优化调整,协同工作,构建智能机器和柔性产线;
基于信息系统数据、制造执行数据、控制系统数据的集成处理和大数据建模分析,结合 5G 的低延
迟和大量接入以及 MEC 集群,可以实现大型工厂的生产运营管理的动态优化调整,形成各种场景
下的智能生产模式,在 MEC 就可以进行部分数据的机器学习,进行可预测性维护,以及大数据量
的分析。基于供应链数据、用户需求数据、产品服务数据的综合集成与分析,实现企业资源组织
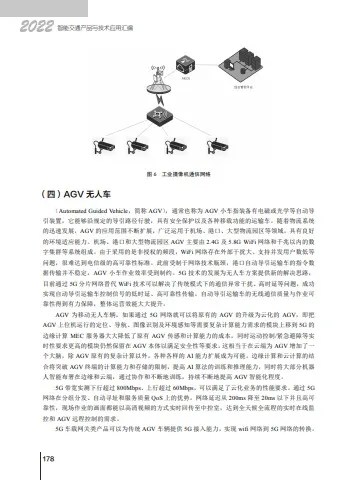
和商业活动的创新,形成网络化协同、个性化定制、服务化延伸等新模式。工业机器人通信网络 如
图 4 所示。
图 4 工业机器人通信网络
(二)工业现场 PLC
PLC 在工业现场有大量的应用,能够协同好各种不同 PLC 设备工作就能很好的利用原有资产,
完成柔性化制造的需求。但是各家的 PLC 的通信协议各有不同,无法互通,包括链路层和协议层都
不一样。
TSN 从链路层上保证了不同通信类型共存的可能性,同时保留实时通信的定时特性。一些现有
基于虚拟化技术的边缘计算方案应用
177
的实时网络(例如 PROFINET、EtherNet/IP)使用通信规划和 QoS 来保证在设备运行良好条件下
的行为。由于将 TSN 用作数据链路层,因此这些技术可以更好地利用带宽效率,因为 TSN 无条
件保护了高优先级的通信。OPCUA 的出现就是为了解决复杂的现场总线无法互通的问题,目前已
经越来越多的工业厂家的 PLC 以及现场设备支持 OPCUA 协议。而且 OPCUA 协议不仅考虑到了现
场通信,也考虑了工厂外的业务通信,OPCUA 会是未来的工业协议标准。 工业现场 PLC 通信网络
如图 5 所示。
图 5 工业现场 PLC 通信网络
工业 5G 通用网关支持工业环网,通过 TSN 完成实时和非实时通信。通过 OPCUA 协议连接不
同厂家的 PLC 设备,实现异厂家的 PLC 的协同工作。
(三)工业摄像机
工业摄像机是一种适用于智能交通、高清电子警察系统、工业检测、半导体检测、印制板检测、
食品饮料检测等众多领域应用的高分辨率彩色数字摄像机。它具传输速度快,色彩还原性好,成像
清晰等特点。不但能够方便拍摄显微图像,而且能够测量拍摄物体的长度、角度、面积等系列参数。
高分辨率工业数字摄像机安装使用操作也很简单。现代的工业摄像机支持 ONVIF、GB28181 等通用
协议,保证了协议操作的一致性,而且提供了对摄像机的控制功能。当视频数据量过大的时候,可
能会占用上行链路的带宽,导致控制协议得不到调度。
工业边缘计算网关,能够利用 5G 网络的大带宽和低延时快速透传大量的视频数据,而且可以
识别 ONVIF、GB28181 等通用协议,在传输数据数据的过程,可以配置优先保证 ONVIF、GB28181
的数据优先传输,从而保证控制流的高优先级。同时在工业边缘计算网关中,提供边缘视频数据处
理的能力,在不需要把所有信息上传到平台的情况,本地对视频流进行处理,把需要上传的数据再
上传到管控平台。工业摄像机通信网络如图 6 所示。
智能交通产品与技术应用汇编
178
图 6 工业摄像机通信网络
(四)AGV 无人车
(Automated Guided Vehicle,简称 AGV),通常也称为 AGV 小车指装备有电磁或光学等自动导
引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。随着物流系统
的迅速发展,AGV 的应用范围不断扩展,广泛运用于机场、港口、大型物流园区等领域,具有良好
的环境适应能力。机场、港口和大型物流园区 AGV 主要由 2.4G 及 5.8G WiFi 网络和千兆以内的数
字集群等系统组成。由于采用的是非授权的频段,WiFi 网络存在外部干扰大、支持并发用户数低等
问题,很难达到电信级的高可靠性标准。此前受制于网络技术瓶颈,港口自动导引运输车的指令数
据传输并不稳定,AGV 小车作业效率受到制约。5G 技术的发展为无人车方案提供新的解决思路,
目前通过 5G 分片网络替代 WiFi 技术可以解决了传统模式下的通信异常干扰、高时延等问题,成功
实现自动导引运输车控制信号的低时延、高可靠性传输。自动导引运输车的无线通信质量与作业可
靠性得到有力保障,整体运营效能大大提升。
AGV 为移动无人车辆,如果通过 5G 网络就可以将原有的 AGV 的升级为云化的 AGV,即把
AGV 上位机运行的定位、导航、图像识别及环境感知等需要复杂计算能力需求的模块上移到 5G 的
边缘计算 MEC 服务器大大降低了原有 AGV 传感和计算能力的成本,同时运动控制/紧急避障等实
时性要求更高的模块仍然保留在 AGV 本体以满足安全性等要求。这相当于在云端为 AGV 增加了一
个大脑,除 AGV 原有的复杂计算以外,各种各样的 AI 能力扩展成为可能。边缘计算和云计算的结
合将突破 AGV 终端的计算能力和存储的限制,提高 AI 算法的训练和推理能力,同时将大部分机器
人智能布署在边缘和云端,通过协作和不断地训练,持续不断地提高 AGV 智能化程度。
5G 带宽实测下行超过 800Mbps、上行超过 60Mbps,可以满足了云化业务的性能要求。通过 5G
网络在分组分发、自动寻址和服务质量 QoS 上的优势,网络延迟从 200ms 降至 20ms 以下并且高可
靠性,现场作业的画面都能以高清视频的方式实时回传至中控室,达到全天候全流程的实时在线监
控和 AGV 远程控制的需求。
5G 车载网关类产品可以为传统 AGV 车辆提供 5G 接入能力,实现 wifi 网络到 5G 网络的转换。
基于虚拟化技术的边缘计算方案应用
179
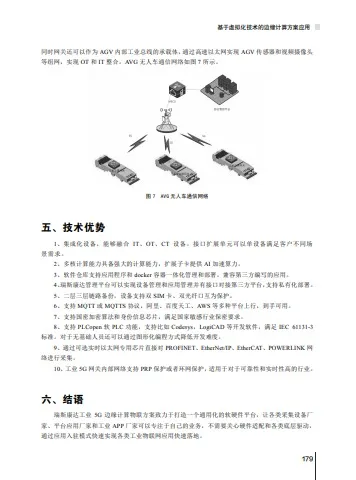
同时网关还可以作为 AGV 内部工业总线的承载体,通过高速以太网实现 AGV 传感器和视频摄像头
等组网,实现 OT 和 IT 整合。AVG 无人车通信网络如图 7 所示。
图 7 AVG 无人车通信网络
五、技术优势
1、集成化设备,能够融合 IT、OT、CT 设备。接口扩展单元可以单设备满足客户不同场
景需求。
2、多核计算能力具备强大的计算能力,扩展子卡提供 AI 加速算力。
3、软件仓库支持应用程序和 docker 容器一体化管理和部署,兼容第三方编写的应用。
4、瑞斯康达管理平台可以实现设备管理和应用管理并有接口对接第三方平台,支持私有化部署。
5、二层三层链路备份,设备支持双 SIM 卡、双光纤口互为保护。
6、支持 MQTT 或 MQTTS 协议,阿里、百度天工、AWS 等多种平台上行,到手可用。
7、支持国密加密算法和身份信息芯片,满足国家敏感行业保密要求。
8、支持 PLCopen 软 PLC 功能,支持比如 Codesys,LogiCAD 等开发软件,满足 IEC 61131-3
标准。对于无基础人员还可以通过图形化编程方式降低开发难度。
9、通过可选实时以太网专用芯片直接对 PROFINET、EtherNet/IP、EtherCAT、POWERLINK 网
络进行采集。
10、工业 5G 网关内部网络支持 PRP 保护或者环网保护,适用于对于可靠性和实时性高的行业。
六、结语
瑞斯康达工业 5G 边缘计算物联方案致力于打造一个通用化的软硬件平台,让各类采集设备厂
家、平台应用厂家和工业 APP 厂家可以专注于自己的业务,不需要关心硬件适配和各类底层驱动,
通过应用入驻模式快速实现各类工业物联网应用快速落地。
智能交通产品与技术应用汇编
180
智慧出行 MaaS 大数据云平台体系架构和实践
八维通科技有限公司
余华琼 陈 刚
引言
交通出行电子支付服务当前主要是用手机(含 PAD 可穿戴设备等)等移动终端设备实现出
行支付,在 MaaS 环境下支付服务内容将大大扩展。电子支付是通过手机等智能终端为载体,通
过移动网,实现资金由支付方转移到受付方的网上支付方式。电子支付存在着多种形式(如二
维码、虚拟卡、生物特征等),不同支付方式需要不同的后台支撑。当前交通运营机构与电子支
付平台提供商合作,提供基于小额支付的出行服务是一种上线快、投资低的模式;而捆绑银行
账户实现的 MaaS 服务支付,则相对复杂;根据是否指定受付方,可将电子支付分为定向和非
定向支付。交通出行支付属于定向支付,而在 MaaS 服务时支付往往是非定向支付。根据支付金
额的大小,又可将电子支付分为小额支付和大额支付。根据支付时支付方与受付方是否在同一
现场,可将电子支付分为现场支付和远程支付。如手机在闸机上支付则是现场支付,通过手机
定制出行就是远程支付,不同的电子支付对安全性、可操作性、实现技术等都有不同的要求,
目的是适合不同服务场景和需求。
本文介绍八维通电子支付的平台设计,该方案成功商用是八维通开拓 MaaS 服务市场的
基础。
1 电子支付云平台建设迫切性
我国政府非常关注交通运输业的发展,提出了将先进信息技术与交通运输深度融合的要求,
为此颁发了“数字交通发展规划纲要”中国数字交通已经进人快车道。但当前交通信息化系统
存在信息孤岛严重、基础设施分散安全管控薄弱,运维体系失衡和标准规范缺失的“乱云飞渡”
现状智慧出行 MaaS 大数据云平台的构建是交通行业的刚需,也是数字交通信息化总体蓝图的首
创一步。
八维通科技有限公司认真地研究了各类电子支付技术和服务特点,平台设计当前主要面向轨交
出行和公交出行客户的服务整合交通运营机构的资源,开展基于小额支付的出行服务技术上支持二
维码、虚拟卡和生物特征等。
智慧出行 MaaS 大数据云平台体系架构和实践
181
2 掌上电子支付应用技术
2.1 电子支付的混搭应用技术
电子支付混搭应用 Mashup 技术,就是监测各类电子支付 ID 信息,通过转码方式来实现电子支
付归一化的技术,通过归一化处置,可有效实现各类电子支付的混搭应用,既便于不同电子支付的
协同服务,也方便了出行运营机构的各类服务聚合运营。首先 MaaS 大数据云平台从各种不同的支
付服务提供商远程获取电子支付服务数据,然后将各类数据进行转码归一后创造出归一的交通出行
互联互通服务这种新形式的出行体验兼容全部申子支付,实现了交通运输部“同一标准、同一编码”
的要求,完成各类交通票务系统开放接入和互联互通。
混搭应用技术在现网改造中,交通信息化系统在平台侧和客户端通过标准规范的接口进行归一
化的生码、发码、验码、发码授权操作,解决不同电子支付互联互通协同服务的难点,保障跨城跨
域电子支付的无障碍服务。
基于电子支付混搭需求创造数字化出行助手,目前应用最多的是客户端软件(如 App),通过出
行助手既方便地进行电子支付服务,也可实现出行定制服务。数字化出行助手以数据链衔接出行需
求与服务资源,使出行成为按需获取的即时服务。
2.2 安全和可靠的电子支付服务
电子支付在提供快捷易用支付服务的同时更应突出安全和可靠,安全可靠是便捷易用的柱石。
八维通在安全可靠的电子支付上推出国内领先的技术和系列化产品。
2.2.1 主从标识和多码认证技术
(1)主从标识:主标识是统一账号+实名信息。从标识可以是各金融机构的账务标识,终端标
识等,每次支付交易用户侧只需从标识认证,云平台侧进行主标识的协同认证,这样的认证鉴权隔
离了主标识,保障个人隐私信息难以泄露。
(2)多码认证:当前电子支付认证几乎都是单码认证如二维码卡 ID 等,因此存在风险,该
次设计采用多重安全因子叠加的多码认证,可大大降低误判保障了用户金融安全。多码安全因
子可以是 EPC 电子产品代码 Ecode 物品编码、IMEI 移动设备识别码、ICCID 卡识别码 IMSI
移动用户识别码、ISDN 国际移动号码等。在支付认证时根据服务等级要求(小额支付、大额
支付等),可以是单码免密支付,也可以双码乃至多码的捆绑认证,且所有支付认证都是隐性
(网上不可爬取)。
2.2.2 双网通信技术
在云平台和支付机构间采用双网(双通道)信息交互,用户的安全信息在高等级安全通道上传
输,其他的用户服务信息在互联网上传输,以保证支付服务电信级+金融级的安全和可靠。当前蓬
勃发展电信级网络(5G 移动网、SDN)都提供了高等级的信息传输能力,该技术确保用户关键隐私
信息的网络传输安全。
2.2.3 增强安全认证机制
智能交通产品与技术应用汇编
182
支付服务商提供电子支付除,除利用主从标识和多码认证外还可增补大数据安全 AI 技术的嵌
入(如位置信息、用户行为、用户状态、终端状态、信用信息、储值状态等)在高等级的金融交易
认证上,增强支付服务的安全保障。
2.2.4 相关规范标准制定
电子支付横跨长产业链,涉及交通运营机构、金融机构、电子支付服务商、清分服务商系统
集成商、MaaS 商户及用户等,因此,规范标准的制定显得十分重要,八维通已经成功投入规范
标准的制定,如《城轨互联互通 APP 接口规范》《城轨互联互通 SDK 接口规范》《城轨互联互通
票务接口规范》《交通出行互联互通方案技术建议书》等,当前还在为电子支付全系列规范制定
努力。
2.2.5 网间数据安全网关
网间数据安全网关采用 IFA(Information Ferry Area)信息摆渡网闸技术,可以胜任云平台逻辑
隔离和物理隔离的安全要求 IFA 信息摆渡网闸部署在不同安全等级的网络之间,达到在支付金融内
网和互联网之间在不存在 IP 链接的情况下进行在线数据交互的目的。信息摆渡网闸还可直接监管网
间的应用层数据,采用在线协议信息摆渡转发的方法进行应用数据的交互,在交互的同时对应用数
据进行认证授权、服务授权、黑客防范、数据过滤、路由检查等监管。这种在线协议信息摆渡链接
保留了已建网路由器、防火墙、交换机 IP 链路层且仍然畅通。
2.3 电子支付对交通信息化系统的最低改造
为了迅速推进电子支付在交通出行互联互通中落地应用。同时考虑交通信息化系统各地的差异
性(厂商不同)复杂性(设备众多)、改造成本高、改造周期长等原因,本文提出了交通信息化系统
中的软件嵌入模式(即改软件不碰硬件原则),使交通信息化系统在无需改造,只需对客户端软件和
交通信息化系统嵌人开放接口的方式完成电子支付服务。
目前云平台应提供的开放接口有:交易类接口、账务类接口和业务管理类接口。从传送内容上
有消息类和文件类接口,实时接口和非实时接口。
3 MaaS 服务电子支付业务定义
目前交通运营机构电子支付业务有,轨交支付服务、公交支付服务、网约车支付服务、共
享单车支付服务、停车充电支付服务等。各类支付彼此独立孤岛式运营,未能互联互通、协同
支付服务尚在规划中。
MaaS 服务支付是在各类支付技术差异和业务独立现状上,通过改造交通运营机构客户端
软件和多种开放接口互通各类信息化设施达到电子支付和应用的融合,从而满足交通出行需
求。该方案云平台建设客户能够使用交通出行数字化出行助手,通过掌上支付进行快捷易用的
各类出行服务。
智慧出行 MaaS 大数据云平台体系架构和实践
183
4 电子支付云平台体系架构
4.1 采用大数据中台模式的 MaaS 云平台架构
云平台采用大数据中台模式架构,中台模式的云平台通过数据采集系统集聚交通信息化系统的
各种数据,以数据链互通交通信息化系统的各类设施形成聚合的大数据仓库。云平台对外通过标准
化的接口,融通外部服务系统实现和外部异构系统间的数据共享联动,改软不碰硬的设计极大地减
少交通信息化系统的改造成本。再增权限控制、流程流转和统计分析等,形成交通行业生态和大数
据环境。中台化的云平台的特点是在产品开发和维护的过程中,不再依赖于专业人员通过开放接口
就可以 DIY 开发差异化的应用系统,特别适合数字交通服务的跨界融合、相互渗透的数字交通产业
生态建设的要求,适合 MaaS 服务异构融通的信息化系统建设的要求。让交通行业在激列的市场竞
争中快速满足出行用户井喷式的各类需求。中台模式的云平台提供多种能力引擎,提供开发套件、
数据标准体系和数据治理的公共服务。
云平台总体架构重点考虑可靠性、安全性、可扩展性、可维护性等要求,无论从支付服务发展
要求来看.还是从安全要求来审视,上述的性能必须保证。同时云平台与交通原有的信息化系统需要
低成本无缝连接,还方便外部系统安全可靠的连接。
云平台建设初期实现业务为出行服务(特别是跨城互联互通出行服务),电子支付乘车服务,当
然还包括网上充值、账务查询、出行定制等关联服务。在支付产业链上必须考虑 MaaS 服务的导入,
并需保证云平台和政务大数据中心的互通接口。云平台建设除考虑用户终端接口外更需考虑和政府、
各类机构和协同商企的接口设计。服务拓展随之带来的网络安全、数据安全和接入安全就变得尤为
重要,该云平台设计除常规的网关防火墙外专门配置了安全隔离网闸、访问控制系统确保云平台和
外部信息化系统协同运营。
由于云平台部署在交通运营机构的外部服务网络,可通过安全隔离网闸与部署在内部生产网络
的相关信息化系统安全连接,主要关联的信息化系统有 AFC 自动售检票、ACC 清分系统、ISCS 综
合监控、PIS 乘客信息系统、CRM 客户关系管理、ERP 企业资源规划、帐务系统等核心信息化系统,
内部信息化系统间的数据互传通过数据企业总线实现。
4.2 现网运营的数字票务平台系架构
数字票务平台是云平台的支付账务子系统,是为快速开通交通出行电子支付跨城互通出行的首
期平台,通过平台架构可以了解支付账务系统模块功能。数字票务平台可以实现各类支付服务的“统
一账号”的一体化服务,账务清分系统完成支付合作伙伴的账务服务。数字票务平台采用云平台规
约的开放式构架,通过各类网关(开放式接口)和各类客户终端、金融机构信息化系统的数据安全
可靠传输,达到交通机构聚合支付服务的目的。八维通保证数字票务平台向智慧出行 MaaS 大数据
云平台的在线升级。
数字票务平台对交通运营机构的出行服务清晰地分为属地交通出行业务和漫游交通出行业务,
十分有利交通运营机构清晰地分域管理和运营。
4.3 交通出行电子支付逻辑
智能交通产品与技术应用汇编
184
聚合支付云平台电子支付支持的技术方式目前有二维码支付(借助广域互联网)虚拟卡支付(使
用近场通信)生物特征支付(借助 AI 技术)。用户使用这三种电子支付方式目前已经可以进行轨交
乘车支付、公共交通乘车支付、停车场等近场支付服务。
(1)智慧出行 MaaS 服务开通流程
MaaS 服务客户端(主要是 APP)的用户要使用 MaaS 服务(当前是出行乘车支付服务)必须在
云平台上先行服务开通操作。
(2)交通出行电子支付乘车业务流程
云平台旨在为用户提供跨城跨域的出行电子支付服务,乘客可通过交通出行官方 APP 生成的指
定城市出行电子支付标识(统一标识)即可实现刷码过闸,提供便捷的交通出行体验。
4.4 使用交通出行电子支付进行 MaaS 非出行支付
用户打开客户端 App 或登录云平台门户,在线进行公共事业费的缴付、电子支付账单支付和电
子支付在线钱包充值,并针对交通出行电子支付账务进行管理。在这些基本业务之外,电子支付可
进行其他 MaaS 服务支付,例如停车、加油、充电、旅游和住宿等支付。
4.5 MaaS 大数据云平台管理
八维通科技有限公司 MaaS 大数据云平台中具备完善的后台管理系统,包括平台维护、对账结
算、商户管理、业务管理、统计分析、账务处理、额度配置等模块。这些模块为平台运营、资金结
算、费率配置客户服务以及营销导向等管理带来了极大方便。针对开放式构架的数据中台的要求还
增加了多种中台能力引擎,内含开源开放套件组件(包含自助查询套件、敏捷开发套件和数据集成
套件等),数据服务组件(内含公共明细数据检索树汇总数据检索树、服务操作数据检常树等)数据
治理组件(内含数据地图数据血缘、数据质量、数据资产管理等)。
4.6 安全设计与风险控制
综合考虑该次云平台设计,云平台涉及服务数据、功能配置数据等,较为敏感的数据有支付账
务 ID 和密码数据,第三方支付 ID 和密码关联,甚至银行卡 ID 和密码等。
当用户通过网络进行电子支付服务时,需要通过手机扫一扫、碰一碰、看一看,实质上是通过
交通出行闸机等读解支付 ID(账号)经过交通运营机构的内部生产网络传输到智慧出行云平台(数
字票务中心)。因此,必须在后台支付资金信息传输环节进行特定的安全管控,保证电子支付的可靠
性和安全性,该平台建议采用双网通信的传输技术。
另外,对于出行电子支付,为了避免坏账风险,云平台进行了必要的额度控制,即保证用户正
常的使用同时避免交通运营机构的坏账风险。而对于金融机构和支付服务商来说,为了在资金上有
较强的管控力度实行了充值额度限制。这些安防管控均可在云平台账务管理系统中做到可配置.操作
留痕和可追溯等机制。
云平台在交易可追溯性方面增强了数据留存能力,保证无论在哪种支付企业的资金源,还是银
行的资金源,都进行 36 个月以上的交易记录存档,以备查询。
智慧出行 MaaS 大数据云平台体系架构和实践
185
5 结语
电子支付在交通出行特别是 MaaS 服务方面尚处起步阶段,八维通通过数字票务平台的高速建
设,使电子支付这项高科技快速取得实际运营落地,交通出行对数字票务平台的要求很高,八维通
在缺乏电子支付运营经验的情况下,能够快速提出电子支付综合解决方案的技术和服务是非常值得
肯定。最难能可贵的是数字票务平台(即将升级为 MaaS 大数据云平台)在短短的几年内建设完成
并推向出行服务市场,平台投产运行以来一直工作稳定,平台数据处理能力出色,无服务故障,为
在我国交通云平台的运营和建设打下了极佳基础。
智能交通产品与技术应用汇编
186
交通运输信息化标准体系框架设计与
拓扑关系研究
中交水运规划设计院有限公司
熊 婷 陈永剑 唐 菁
摘 要:针对如何结合信息技术及交通运输行业应用融合特点,分析信息化标准间的内在关联,
并对标准体系框架进行设计,本文构建了标准体系框架拓扑关系常见图图谱。用拓扑分类方法描述
了标准体系框架结构拓扑的特点和适用关系,探讨了二维、三维空间模型及分解层次对标准的作用
和影响,并对“十五”以来的各时期的阶段确定的交通运输信息化标准体系及其拓扑关系进行了剖
析,验证了各阶段拓扑关系设计对标准体系的编制的支撑影响,为公路、水路交通运输信息化及其
他行业标准体系构建提供参考。
关键词:公路水路交通运输信息化 标准体系框架 空间模型 拓扑关系
中图法分类号:U495 U6-9 U111TP399
0 引言
标准体系在标准化中占有不可或缺的地位,一般包括标准体系图框架、标准体系表(含标准
明细表)、标准体系编制说明(含标准统计表)三部分,是编制标准制、修订规划和计划的重要
依据。标准体系框架是一种拓扑关系结构,表现为一种分类方法,用来对标准进行分类,通过
它可以把大量已制定的无序标准映射为有序子体系。标准体系表是指一定范围内的标准等特定
形式排列的图表,其组成单元是标准。标准体系编制说明是体系相关技术背景和重要过程文件,
对体系编制过程及过程中产生的问题具体说明。交通运输行业业务和管理体制的复杂性,决定
了交通运输信息化建设是一项庞大且复杂的系统工程,其标准化也较为复杂,涉及不同阶段交
通运输(公路、水路、铁路)等行业众多业务。交通运输信息化标准体系是指在交通运输信息
化建设领域内的标准按其内在联系形成的整体,其不是标准的简单叠加,而是根据标准的基本
要素和内在联系,按系统性、规范性、有效性、协调性、层次性、发展性而形成的一定集合程
度和水平的整体结构。
交通运输信息化标准体系框架设计与拓扑关系研究
187
1 标准体系范围
标准体系可以按照标准级别、标准类别、标准用途、标准行业等属性进行分类,多个属性叠加
属于混合属性,这些属性分类描述了标准体系的范围,属性越多,描述越精确。
例如:按照标准级别,分为国际标准体系、国家标准体系、行业标准体系、地方标准体系、团
体标准体系和企业标准体系;按照标准类别,分为技术标准体系、管理标准体系、工作标准体系等;
按照标准所属行业分类则一般分为农业标准体系、林业标准体系等。《交通运输信息化标准体系》属
于混合型标准体系,体系范围用体系属性分类表示见表 1。除进行属性分类表示外,每个版本的混
合型标准体系一般在标准编制说明中具体描述体系所含标准的范围。如:《交通运输信息化标准体系
(2019 年)》编制说明中描述其纳入体系的标准是指综合交通运输、公路、水路领域与信息化直接相
关的现行有效以及列入近三年制修订计划的国家标准与交通运输行业标准,以及公路工程及水运工
程现行标准中的信息化标准,铁路、民航、邮政单一领域的标准不纳入。
表 1 交通运输信息化标准体系属性分类表示
分类属性 标准级别 标准类别 标准行业
国际标准体系 技术标准体系 农业标准体系
国家标准体系 管理标准体系 林业标准体系
行业标准体系 工作标准体系 交通运输、仓储和邮政业标准体系
地方标准体系 —— 信息传输、软件和信息服务标准体
系
团体标准体系 —— …
交通运输信息化标准体系
范围
企业标准体系 —— ——
2 标准体系框架
标准体系框架是标准内部关系的全貌反映,是一段时期标准体系中的标准规划、管理、放置、
查找和检索的容器。标准体系框架本质上可以映射为一种或者多种拓扑关系,可以缩小查询的目标
对象的范围,制定结构化查找的路径,被广泛用于标准的现代化管理。如何结合标准体系框架的拓
扑关系来清晰地映射体系各项属性及属性子项分类关系,是标准体系设计中的关键。借鉴计算机网
络常见拓扑结构,星型、环型、总线型和树状拓扑关系多用于标准体系框架设计,可以更直观表示
标准间的内在联系。
星型体系框架常用于同属一个管理体系内的标准体系群。在这种拓扑结构下,各标准体系构成
辐射状,是相互独立的标准群。每个标准体系下又可以采用其他拓扑形式,形成内部标准体系结构
关联。如图 1 所示。
总线型体系框架常用于开放性的标准体系,围绕同一类标准化工作,按照时间或者专业领域不
断扩充的框架形式,如图 2 所示。
环形体系框架常用于周期性的标准体系,例如产品类的标准体系,如图 3 所示。网状型体系框
架与环形体系框架类似,区别在于环形体系框架中各部分标准顺序关联,网状型体系框架中,各部
分标准之间互有关联,如图 4 所示。
智能交通产品与技术应用汇编
188
交通运输标准化体系
政策制度体系
标准国际化体系
技术标准体系
支撑保障体系
实施监督体系
图 1 星型体系框架
法律法规 工作概要 制定工作程序
合格评定和IT产品认证 JTC1及其各SC业务计划
信息技术标准化
图 2 总线型体系框架
产品立项标准
产品运维标准
产品量产标准
产品设计标准
产品试生产标准
产品研发标准
综合交通系列
总体标准
通用标准
绿色交通系列
智慧交通系列
平安交通系列
图 3 环型体系框架 图 4 网状型体系框架
树状标准体系框架常用于技术型标准体系。一般树状体系框架的底层是标准的实际层,上层起
到了归纳分类和路径引导作用,如图 5 所示。
设计标准 建设标准 管理标准 养护标准
**标准
XXX标准体系
**标准 **标准 **标准 **标准 **标准 **标准 **标准
图 5 树状体系框架
交通运输信息化标准体系框架设计与拓扑关系研究
189
3 框架设计及拓扑分析
交通运输信息化标准的体系化工作始于“十五”期间,交通运输信息化标准体系框架的选取和
设计从一个角度反映了各个时期交通运输行业信息化发展的主要脉络。
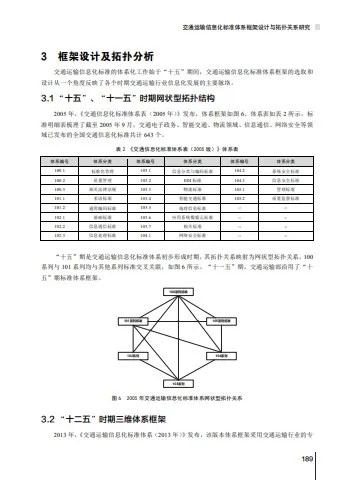
3.1 “十五”、“十一五”时期网状型拓扑结构
2005 年,《交通信息化标准体系表(2005 年)》发布,体系框架如图 6、体系表如表 2 所示。标
准明细表梳理了截至 2005 年 9 月,交通电子政务、智能交通、物流领域、信息通信、网络安全等领
域已发布的全国交通信息化标准共计 643 个。
表 2 《交通信息化标准体系表(2005 版)》体系表
体系编号 体系分类 体系编号 体系分类 体系编号 体系分类
100.1 标准化管理 103.1 信息分类与编码标准 104.2 系统安全标准
100.2 质量管理 103.2 EDI 标准 104.3 信息安全标准
100.3 相关法律法规 103.3 物流标准 105.1 管理标准
101.1 术语标准 103.4 智能交通标准 105.2 质量监督标准
101.2 通用编码标准 103.5 地理信息标准 -- --
102.1 基础标准 103.6 应用系统数据元标准 -- --
102.2 信息通信标准 103.7 相关标准 -- --
102.3 信息处理标准 104.1 网络安全标准 -- --
“十五”期是交通运输信息化标准体系初步形成时期,其拓扑关系映射为网状型拓扑关系,100
系列与 101 系列均与其他系列标准交叉关联,如图 6 所示。“十一五”期,交通运输部沿用了“十
五”期标准体系框架。
100系列标准
101系列标准
102系列
105系列标准
103系列
104系列
图 6 2005 年交通运输信息化标准体系网状型拓扑关系
3.2 “十二五”时期三维体系框架
2013 年,《交通运输信息化标准体系(2013 年)》发布,该版本体系框架采用交通运输行业的专
智能交通产品与技术应用汇编
190
业领域(对象)、信息化内容(内容)和标准种类(类别)的三维标准体系框架模型,如图 7 所示。
三维的架构清楚地表达了交通运输信息化标准体系的三种属性,为未来体系的扩充留有了一定空间,
新的标准可以根据所属的业务领域、信息化内容和标准种类,迅速划分到体系中恰当的位置。该版
本标准体系表梳理了截至 2012 年 12 月 30 日,已发布的标准 236 项,已列计划标准项目 109 项,共
计 345 项。
图 7 交通运输信息化标准体系(2013 年)框架模型
从拓扑关系上划分,三维体系最终可以投影为二维树状拓扑结构,例如:按照 X 轴(业务领域)
中公路建设与管理维度,可以将三维体系框架展开成为树状拓扑结构,如图 8 所示。
1 公路建设与管理
1.100 基础设施 1.200 信息应用
1.101
硬件设备
1.300 信息资源
1.101.1
基础标准
1.102
网络通信
1.201
功能架构
1.202
性能要求
1.203
用户视图
1.301
数据与数据元
1.302
分类及代码
1.101.2
专用标准
1.102.1
基础标准
1.102.2
专用标准
1.201.1
基础标准
1.201.2
专用标准
1.202.1
基础标准
1.202.2
专用标准
1.203.1
基础标准
1.203.2
专用标准
1.301.1
基础标准
1.301.2
专用标准
1.303
数据交换
1.302.1
基础标准
1.302.2
专用标准
1.303.1
基础标准
1.303.2
专用标准
1.400 信息安全 1.500 信息工程
1.402
网络安全
1.403
主机安全
1.404
数据安全
1.501
工程设计
1.502
工程实施
1.402.1
基础标准
1.402.2
专用标准
1.403.1
基础标准
1.403.2
专用标准
1.404.1
基础标准
1.404.2
专用标准
1.501.1
基础标准
1.501.2
专用标准
1.503
工程管理
1.502.1
基础标准
1.502.2
专用标准
1.503.1
基础标准
1.503.2
专用标准
1.401
物理安全
1.401.1
基础标准
1.401.2
专用标准
1.405
应用安全
1.405.1
基础标准
1.405.2
专用标准
1.406
安全管理
1.406.1
基础标准
1.406.2
专用标准
图 8 交通运输信息化标准体系(2013 版)二维拓扑图
交通运输信息化标准体系框架设计与拓扑关系研究
191
3.3 “十三五”时期树状拓扑结构
为更好地适应我国交通运输行业信息化发展新形势和新要求,2019 年,《交通运输信息化标准
体系(2019 年)》发布,该版本标准体系框架如图 9 所示。
该版本标准明细表中包括截至 2018 年 12 月 30 日标准共计 495 项,其中已发布国家标准 114
项,行业标准 198 项,待制订国家标准 44 项,行业标准 139 项。交通运输信息化标准体系
200
基础设施
202
网络与通信
100
基础通用
201
硬件设备
300
数据资源
400
信息应用
402
测试维护
401
技术要求
500
网络安全
504
安全服务
501
安全技术
502
安全管理
503
网络信任
600
工程规范
102
分类与代码
101
术语及符号
103
数据元与元数据
104
通用规则
301
数据表示
302
数据采集
303
数据交换
304
数据管理
603
工程运维
601
工程建设
602
工程管理
图 9 交通信息化标准体系结构框架模型(2019 年)
相比于 2013 年体系的三维结构模型,本版标准体系框架直接采用了二维树状拓扑结构,重点突
出了信息技术标准体系的属性,聚焦硬件设施、信息资源管理、信息化技术应用、网络安全和信息
化工程等重点领域。
3.4 拓扑关系及适用性趋势
交通运输信息化标准体系框架其拓扑关系也具备阶段性、层次与复杂度协调性、开放性等典型
特征。如表 3 所示。
“十五”时期,“十一五”时期,交通行业信息化发展从系统建设阶段进入到信息整合阶段,
包括交通信息基础数据元、信息资源核心元数据、集装箱电子数据交换、电子收费等一批交通运输
信息化基础性国家和行业标准的发布,极大地扩充了体系中的标准容量。交通运输信息化标准体现
智能交通产品与技术应用汇编
192
为数量多、关联性高、内容重复度高;星型拓扑关系较为清晰地表现了当时标准关系分类现状,标
准间关联密切,便于关联分析,但标准间分类清晰度不够。
“十二五”时期,交通运输部组织研究确定了第一批需严格执行的交通运输信息化标准目录,
交通运输信息化标准属性分布相对清晰、相对固定,三维体系框架的设计可以迅速定位体系内的标
准,同时突出了信息技术、业务领域、标准种类三维属性,清晰高效;但三维属性展开映射为四级
的树状拓扑关系,若属性发生变化或者属性分类增多时,拓扑关系层级数及变化量则将增多,易用
性降低。
“十三五”时期是我国全面建成小康社会的决战时期、全面深化改革的攻坚时期和全面推进依
法治国的关键时期,交通运输业发展的内外部环境发生了深刻变化。随着各专业技术标准化委员会
的同步健全及“3~5 年标准制修订计划”的实施,交通运输信息化标准体系属性较多,管理体系正
逐步清晰完善。同时,大数据、云计算、人工智能等新一代信息技术大量应用,交通运输行业的新
业态、新模式对标准体系框架的开放、融合性提出了更高的要求,标准体系直接采用三层树状拓扑
结构便于与国家和行业信息技术标准化有关的法律法规和规章制度相衔接,与《交通运输标准化体
系》及重点领域标准体系相协调,降低体系框架模型分解难度,反映了体系趋于精简开放的特征。
表 3 交通运输信息化标准体系框架拓扑关系及特点对比表
交通运输信 已发布标准数 已列计划项目数 新增项目数
息化体系 体系框架
国标 行标 国标 行标 国标 行标
合计 拓扑
结构 特点分析
2005 年 二维架构 272 67 81 23 53 147 643 星型
拓扑
容量大;分类清晰度不够;标
准间关联较多;适用于体系发
展初期阶段
234 111
2013 年 三维架构
— — — —
— — 345
树状
拓扑
4 级
属性清晰、固定;标准定位方
便;适用于标准属性特征明显
的发展期
2019 年 二维架构 114 198 44 139 — — 495
树状
拓扑
2 级
属性增多、变化快;多标签定
位;适用于标准体系健全期;
易于开放查询
4 结论
交通运输信息化标准体系框架的设计更多地服务于各个阶段交通运输信息化建设的实际需求,
按照交通运输信息化标准内在联系,进行系统性地构建。其设计方法与法规、政策、标准、关键技
术及实践方法等发展密切相关,更多地考虑为促进交通运输领域业务协同发展提供支撑,同时为促
进各阶段新信息技术在交通运输行业的创新应用和发展,并为后续业务领域、重点技术领域扩展留
有空间。从“十五”、“十一五”的星型拓扑,到“十二五”的 4 级树状拓扑,再到“十三五”的
2 级树状拓扑,交通运输信息化标准体系框架设计的变更反映了标准快速扩容-逐步规范-开放融合的
趋势,交通运输信息化标准体系框架及其拓扑关系分析更多是从社会法制化、机构制度化、业务规
范化及信息技术标准化、服务便捷化等角度入手,分析政策制定、组织协调、统筹规划、标准制定、
服务指导监督等方面因素,选取适用性更高的框架进行设计,从而更好地推动交通运输行业信息化
建设并进一步发挥体系的基础支撑性作用!
交通运输信息化标准体系框架设计与拓扑关系研究
193
参考文献
[1]中华人民共和国交通部.2005~2006 年度中国交通信息化发展报告[R].北京:人民交通出版社,2006(6):79-82.
[2]穆勇、彭凯等著.政务信息资源目录体系建设理论与实践[M].北京:北京大学出版社,2009(11):195-197.
[3]麦绿波.标准体系的结构关系研究[J].中国标准化.2011(02):40-41
[4]《标准编写规则》(GB/T 20001)[S]
[5]《标准体系构建原则和要求》(GB/T 13016-2018)[S]
[6]《国民经济行业分类》(GB/T 4754-2017)[S]
[7]中华人民共和国交通运输部.交通运输部办公厅关于发布《交通运输信息化标准体系(2019 年)》的通知.[EB/OL].https:
//xxgk.mot.gov.cn/2020/jigou/kjs/202006/t20200623_3317355.html.
[8]中华人民共和国交通运输部.交通运输部办公厅关于发布交通运输信息化标准体系表(2013 年)的通知.[EB/OL].https:
//xxgk.mot.gov.cn/2020/jigou/kjs/202006/t20200623_3316823.html
[9]中华人民共和国交通运输部.关于印发第一批需严格执行的交通运输信息化标准目录的通知(2011 年).
[EB/OL].https://xxgk.mot.gov.cn/2020/jigou/kjs/202006/t20200623_3316733.html
智能交通产品与技术应用汇编
194
基于车车通信的交叉口直行碰撞预警研究
195
自动驾驶与车路
协同篇
智能交通产品与技术应用汇编
196
基于车车通信的交叉口直行碰撞预警研究
中国汽车技术研究中心有限公司
吴志新
[摘要] 城市交叉口是发生交通事故的主要区域之一,由于路口周围建筑物或者绿化树木遮挡
使驾驶员无法有效观察到交叉口周围的交通参与者信息从而诱发碰撞危险。文章选取最为典型的直
行交叉碰撞预警场景,详细叙述了基于车车通信技术的碰撞预警系统工作原理,开发了地图位置匹
配算法和基于时间差的直行碰撞预警算法,建立了三级的预警发布策略,最后通过对比实验验证了
该算法的有效性,对于推动车车通信技术的应用、降低城市交叉口碰撞事故的发生具有积极作用。
关键词:车车通信;交叉口;地图匹配;碰撞预警;
一、前言
随着我国经济的快速发展和人们生活水平的逐步提高,我国汽车的保有量越来越大,随之带来
尾气排放污染环境、道路拥堵交通事故频发等。据统计,发生交通事故的主要类型有正面碰撞、侧
面碰撞、追尾相撞、翻滚等,其中城市交叉路口为发生交通碰撞事故的主要区域之一[1]。发生这些
碰撞的主要原因是驾驶员注意力分散以及对外界障碍物反应不及时,无法做出有效的制动措施。
为解决碰撞事故的发生,目前已有大量研究投入到碰撞预警和自动紧急制动系统中,主要思路
是在车体搭超声波雷达、载毫米波雷达、摄像头等传感器进行碰撞前的检测,通过多传感器融合算
法提升检测精度,从而进行碰撞前预警或进行紧急制动,避免碰撞的发生[2]。然而在城市交叉路口
由于路口周围建筑物及绿化树木的遮挡,现有的基于车载传感器的碰撞预警系统无法有效检测垂直
交叉方向来车并预测碰撞危险,因此可能导致碰撞事故的发生[3]。
为应对极端工况下的碰撞危险,本文开展了基于车车通信的交叉口直行碰撞预警系统的研究,
利用基于 LTE-V 新一代无线通信技术实现车车之间的信息交换,研究了基于车-车通信的碰撞预警
算法,提升了超范围及突发情况下的远车状态感知能力,有利于减少碰撞事故的产生。
二、交叉口直行碰撞预警系统原理
本文研究的场景为无信道控制的城市交叉路口,主车 HV 和远车 RV 垂直交叉通过该路口,车
基于车车通信的交叉口直行碰撞预警研究
197
辆间存在冲突碰撞危险。
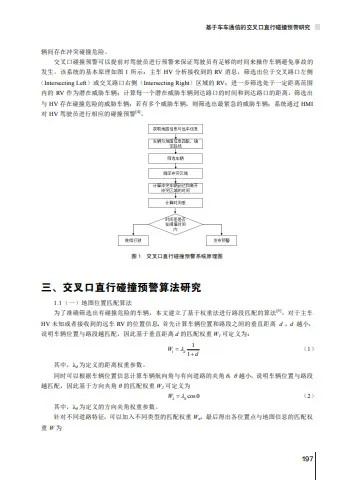
交叉口碰撞预警可以提前对驾驶员进行预警来保证驾驶员有足够的时间来操作车辆避免事故的
发生。该系统的基本原理如图 1 所示:主车 HV 分析接收到的 RV 消息,筛选出位于交叉路口左侧
(Intersecting Left)或交叉路口右侧(Intersecting Right)区域的 RV;进一步筛选处于一定距离范围
内的 RV 作为潜在威胁车辆;计算每一个潜在威胁车辆到达路口的时间和到达路口的距离,筛选出
与 HV 存在碰撞危险的威胁车辆;若有多个威胁车辆,则筛选出最紧急的威胁车辆;系统通过 HMI
对 HV 驾驶员进行相应的碰撞预警[4]。
图 1 交叉口直行碰撞预警系统原理图
三、交叉口直行碰撞预警算法研究
1.1(一)地图位置匹配算法
为了准确筛选出有碰撞危险的车辆,本文建立了基于权重法进行路段匹配的算法[5]。对于主车
HV 未知或者接收到的远车 RV 的位置信息,首先计算车辆位置和路段之间的垂直距离 d ,d 越小,
说明车辆位置与路段越匹配,因此基于垂直距离 d 的匹配权重 W1 可定义为:
1
1
1
W d d
(1)
其中,λd 为定义的距离权重参数。
同时可以根据车辆位置信息计算车辆航向角与有向道路的夹角 θ,θ 越小,说明车辆位置与路段
越匹配,因此基于方向夹角 θ 的匹配权重 W2 可定义为
2 W cos (2)
其中,λθ 为定义的方向夹角权重参数。
针对不同道路特征,可以加入不同类型的匹配权重 Wn,最后得出各位置点与地图信息的匹配权
重 W 为
智能交通产品与技术应用汇编
198
WWW W 1 2 n (3)
针对同一种应用而言,对一个位置点 W 越大说明与地图信息的匹配程度越高,可以得到车辆与
路口中心准确的位置与运动估计。
(二)直行碰撞预警算法
本文采用时间差法进行冲突检测及碰撞预警,示意图如图 2 所示,设定驾驶员在速度为 v 时避
免冲突进行操控所需时间为 Tv。如图 3 所示,假设 HV 为先到达冲突区域,RV1 晚到达冲突区域。
两车到达冲突区域的时间差 Δt1=TRV a-THV a ,HV 离开与 RV 到达冲突区域时间差 Δt2=THV b-TRV a 。
当 Δt1<Δt1 阈值时,表示两车几乎同时进入冲突区域,存在潜在的冲突。
当 Δt1>Δt1 阈值时,若 Δt2>0,表示两车相距较大的时间前后到达冲突区域,但前车还未完全离
开冲突区域后车已经进入冲突区域;若 Δt2>Δt2 阈值,表示两车无法在可接受间隙中通过路口,存在
潜在的冲突。
图 2 基于时间差的算法示意图
图 3 相对位置关系图
车辆中心与冲突区域中心相距 d:
2 2 d Xx Yy ( )( ) (4)
车辆实时与冲突区域相距 Sa:
2 2 a
L h S d (5)
车辆到达冲突区域所需的时间 ta:
基于车车通信的交叉口直行碰撞预警研究
199
a
a
S
t
v (6)
(三)直行碰撞预警发布策略
交叉口直行碰撞预警采用分级发布策略,可分为 3 级。第一级是基于地图匹配的信息发布,当
在通信范围内检测到远车且与主车存在冲突可能时,通过交互界面预警发布地理信息系统提示驾驶
员左向或右向来车方向和位置。第二级是基于冲突区域检测的预警,即存在潜在冲突时,通过语音
向驾驶员发布预警谨慎通行。第三级是基于车辆最小安全间距模型通过语音和振动进行预警发布,
提醒驾驶员立即采取制动措施。
四、验证系统搭建
为开展交叉口直行碰撞预警系统功能的验证,在封闭试验场地搭建了验证系统。
(一)路侧通信系统
在车车通信获取车辆位置的同时,需要通过将车辆位置与地图信息匹配以获取相对城市道路的
位置关系及匹配的道路。地图信息由路侧通信单元广播,向车辆传递局部区域的地图信息,包括局
部区域的路口信息、路段信息、车道信息,道路之间的连接关系等。路侧通信系统主要构成为路侧
通信单元,地图信息可通过车路协同云控管理平台将地图信息切片并发布到路侧通信单元,并通过
路侧通信单元将地图信息周期广播到周围车辆,如图 4 所示。
图 4 路侧系统示意图
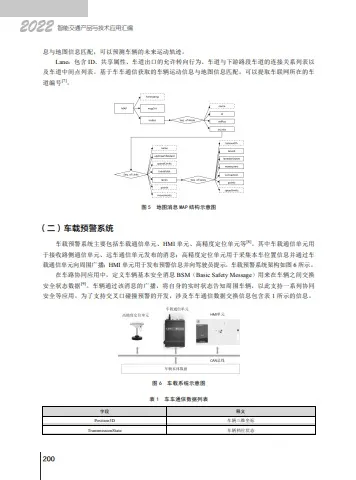
地图信息的主体结构,是一个层层嵌套的形式[6],如图 5 所示,包含 Node、Lane、Link 等基本
属性信息。
Node:地图节点,是地图的最基本组成部分,可以是交叉路口,也可以是一个路段的端点。在
地图上,顺序的两个节点确定一条有向路段。节点属性包括名称、ID、位置以及节点相连的上游路
段集合。一个节点中包含的路段,均以该节点作为下游端点。而从该节点出发的路段,则归属于路
段下游节点的数据中。基于车车通信获取的车辆运动信息与地图信息匹配,可以预测车辆的未来运
动方向。
Link:表示从一个节点到相邻另一个节点的有向路段。其属性包含名称、上游节点 ID、限速集
合、车道宽度,以及该路段包含的车道集合与交通标志标牌集合。基于车车通信获取的车辆运动信
智能交通产品与技术应用汇编
200
息与地图信息匹配,可以预测车辆的未来运动轨迹。
Lane:包含 ID、共享属性、车道出口的允许转向行为、车道与下游路段车道的连接关系列表以
及车道中间点列表。基于车车通信获取的车辆运动信息与地图信息匹配,可以提取车联网所在的车
道编号[7]。
图 5 地图消息 MAP 结构示意图
(二)车载预警系统
车载预警系统主要包括车载通信单元、HMI 单元、高精度定位单元等[8]。其中车载通信单元用
于接收路侧通信单元、远车通信单元发布的消息;高精度定位单元用于采集本车位置信息并通过车
载通信单元向周围广播;HMI 单元用于发布预警信息并向驾驶员提示。车载预警系统架构如图 6 所示。
在车路协同应用中,定义车辆基本安全消息 BSM(Basic Safety Message)用来在车辆之间交换
安全状态数据[9]。车辆通过该消息的广播,将自身的实时状态告知周围车辆,以此支持一系列协同
安全等应用。为了支持交叉口碰撞预警的开发,涉及车车通信数据交换信息包含表 1 所示的信息。
图 6 车载系统示意图
表 1 车车通信数据列表
字段 释义
Position3D 车辆三维坐标
TransmissionState 车辆档位状态
基于车车通信的交叉口直行碰撞预警研究
201
续表
字段 释义
Speed 本车速度
Heading 车辆航向角
SteeringWheelAngle 车辆转向轮角度
AccelerationSet4Way 车辆四轴加速度
BrakeSystemStatus 刹车系统状态
VehicleSize 车辆尺寸大小
VehicleClassification 车辆类型
VehicleSafetyExtensions 紧急车辆或者车辆的辅助信息合集
VehicleEmergencyExtensions 车辆安全辅助信息集合,包括特殊事件状态、车辆历史轨迹、路线预测、
车身灯光状态
车车通信数据交换基本性能要求为:
● 主车车速范围(0~70)km/h;
● 通信距离≥150m;
● 数据更新频率典型值 10Hz;
● 系统延迟≤100ms;
● 定位精度≤1.5m。
五、试验验证
本研究中在封闭试验场内选取典型的十字交叉口作为验证场地,道路为双向两车道,双向路段
长度为 300 米。主车 HV 和远车 RV 分别在路段起始位置以相同的速度驶向冲突区域,验证碰撞预
警系统能否及时预警,且在第三次预警发生时驾驶员及时刹车能否避免碰撞。实验中车辆制动安全
的加速度大小为为 3.6 m/s2。
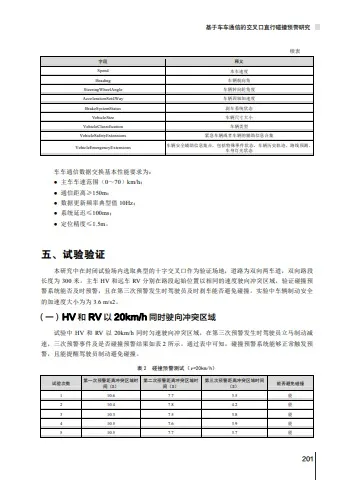
(一)HV 和 RV 以 20km/h 同时驶向冲突区域
试验中 HV 和 RV 以 20km/h 同时匀速驶向冲突区域,在第三次预警发生时驾驶员立马制动减
速,三次预警事件及是否碰撞预警结果如表 2 所示。通过表中可知,碰撞预警系统能够正常触发预
警,且能提醒驾驶员制动避免碰撞。
表 2 碰撞预警测试(v=20km/h)
试验次数 第一次预警距离冲突区域时
间(S)
第二次预警距离冲突区域时
间(S)
第三次预警距离冲突区域时间
(S) 能否避免碰撞
1 10.6 7.7 3.5 能
2 10.4 7.8 4.2 能
3 10.3 7.5 3.8 能
4 10.5 7.6 3.9 能
5 10.5 7.7 3.7 能
智能交通产品与技术应用汇编
202
(二)HV 和 RV 以 40km/h 同时驶向冲突区域
试验中 HV 和 RV 以 40km/h 同时匀速驶向冲突区域,在第三次预警发生时驾驶员立马制动减
速,三次预警事件及是否碰撞预警结果如表 3 所示。通过表中可知,碰撞预警系统能够正常触发预
警,且能提醒驾驶员制动避免碰撞。
表 3 碰撞预警测试(v=40km/h)
试验次数 第一次预警距离冲突区域时
间(S)
第二次预警距离冲突区域时
间(S)
第三次预警距离冲突区域时间
(S) 能否避免碰撞
1 12.8 8.6 6.1 能
2 12.7 8.4 6.0 能
3 12.8 8.8 5.8 能
4 12.6 8.5 6.0 能
5 12.9 8.6 6.1 能
(三)HV 和 RV 以 60km/h 同时驶向冲突区域
试验中 HV 和 RV 以 60km/h 同时匀速驶向冲突区域,在第三次预警发生时驾驶员立马制动减
速,三次预警事件及是否碰撞预警结果如表 4 所示。通过表中可知,碰撞预警系统能够正常触发预
警,且能提醒驾驶员制动避免碰撞。
表 4 碰撞预警测试(v=60km/h)
试验次数 第一次预警距离冲突区域时
间(S)
第二次预警距离冲突区域时
间(S)
第三次预警距离冲突区域时间
(S) 能否避免碰撞
1 14.9 10.8 7.5 能
2 14.8 10.7 8.2 能
3 14.9 10.8 7.8 能
4 15.1 10.7 7.9 能
5 14.9 10.9 7.7 能
六、结论
本文研究开发了基于车车通信的面向城市交叉口的碰撞预警系统,详细介绍了该预警系统的工
作原理,开发了地图位置匹配算法和基于时间差的直行碰撞预警算法,建立了三级的预警发布策略。
利用车车通信系统可以通过车车交换数据实现超视距范围内车辆运动状态的获取,并实施预测车辆
运动轨迹和碰撞可能性。通过实验表明,该系统能够有效对潜在冲突进行预警,避免碰撞的发生。
参考文献
1. Architecture and Application Research of Cooperative Intelligent Transport Systems[J] . Ling Sun,Yameng Li,Jian Gao. Procedia
Engineering . 2016.
基于车车通信的交叉口直行碰撞预警研究
203
2. 侯喆,张洪昌.基于毫米波雷达的汽车与行人碰撞预警系统设计[J].科技与创新,2021(14):126-129.
3. 周琦. 车联网环境下无信号交叉口控制策略研究[D].重庆交通大学,2018..
4. 李璇. 基于 V2X 技术的碰撞风险预警和路口通行辅助方法研究[D].吉林大学,2019.
5. 胡艳,樊亚云,曹钻.城市道路交叉口防碰撞预警的研究[J].无线互联科技,2020,17(08):137-138.
6. 徐建军. 基于车路协同的交叉口盲点避撞技术研究[D].天津职业技术师范大学,2016.
7. An Intersection Game-Theory-Based Traffic Control Algorithm in a Connected Vehicle Environment. Elhenawy M,Elbery A A,
Hassan A A,et al. IEEE,International Conference on Intelligent Transportation Systems . 2015.
8. 胡梦岩. 智能网联环境下的无信号交叉口冲突消解方法研究[D].长安大学,2017.
9. 刘玢滟. 基于 V2X 的道路交叉口车—车避撞预警算法研究[D].重庆交通大学,2018.
智能交通产品与技术应用汇编
204
基于 MaaS 的航天大为自动驾驶接驳小巴
江苏航天大为科技股份有限公司
景钟翔 王 胜
近年来,城市化进程加快给城市交通带来很大压力,共享交通、智能技术、电子支付等技术的
发展为一站式出行提供了可能。2019 年 9 月,党中央、国务院印发了《交通强国建设纲要》,明确
提出要大力发展共享交通,打造基于移动智能终端技术的服务系统,实现出行即服务。
MaaS 是 Mobility as a Service 的缩写,意译为“出行即服务”,是指将多元交通方式的出行服
务进行整合,进而满足消费者的各种交通需求。MaaS 不是一个新的概念,而是人们的出行需求发
展到一定阶段后的一种演化,强调交通系统的共享、多模、人本、一站式。
一、项目介绍
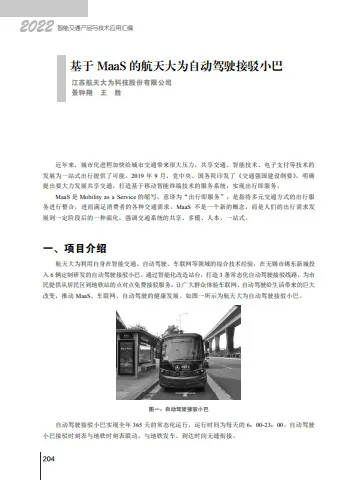
航天大为利用自身在智能交通、自动驾驶、车联网等领域的综合技术经验,在无锡市锡东新城投
入 6 辆定制研发的自动驾驶接驳小巴。通过智能化改造站台,打造 3 条常态化自动驾驶接驳线路,为市
民提供从居民区到地铁站的点对点免费接驳服务,让广大群众体验车联网、自动驾驶给生活带来的巨大
改变,推动 MaaS、车联网、自动驾驶的健康发展。如图一所示为航天大为自动驾驶接驳小巴。
图一:自动驾驶接驳小巴
自动驾驶接驳小巴实现全年 365 天的常态化运行,运行时间为每天的 6:00-23:00。自动驾驶
小巴接驳时刻表与地铁时刻表联动,与地铁发车、到达时间无缝衔接。
基于 MaaS 的航天大为自动驾驶接驳小巴
205
1、自动驾驶技术
航天大为自动驾驶接驳小巴可以精准识别车道线、交通信号灯状态,智能预测行人、车辆等交
通参与者的运动方向、下一秒位置,并做出及时、有效的决策和路径规划。在行车过程中,它会在
遇到红灯时自动停车等待,遇到前方车辆阻挡、行人闯入时智能减速避让,在路口转弯处顺滑地完
成并线和转向操作,所有行为均可平稳、自主完成,无需人工干涉。如图二所示为自动驾驶算法对
不同的交通参与者进行标注。
图二:对不同交通参与者标注
2、预约出行微信小程序
为方便市民预约乘坐自动驾驶接驳小巴,航天大为开发了“航天大为自动驾驶小巴预约”微信
小程序,市民可以扫描电子站牌上的二维码打开小程序,选择乘车线路、填写个人信息、选择出发
站点,生成乘车码,登车时凭乘车码扫码乘车。如图三所示为自动驾驶小巴预约微信小程序。
图三:预约微信小程序
智能交通产品与技术应用汇编
206
除此之外,微信小程序还可以实时查询小巴实时位置,便于市民安排时间乘坐。乘坐过程中市
民有任何意见或者建议,都可以通过小程序提供的“反馈意见”功能进行反馈,我们收到反馈后会
第一时间主动联系乘客并做出改进,提升市民的接驳服务体验。如图四所示为意见反馈页面。
图四:意见反馈
3、智能电子站牌
航天大为智能电子站牌具备以下功能:
(1)导乘功能
电子站牌可以随时接收后台发来的数据,显示本线路所有小巴车辆当前到离站预报。
根据离本站最近车辆的当前位置,计算到达站距离,显示在 LCD 显示屏上。
(2)监控功能
在电子站牌前后各安装一个 400W 像素的高清摄像头,实现对站台情况、车辆进出站情况的监
控,具备摄像头监控的远程开闭、管理和设置功能。
后台中心具备对电子站牌内部的各电子设备远程监控功能,可实时监测设备的工作状态。
电子站牌通过网络将前端电子站牌摄像机拍摄的图像传输到自动驾驶接驳小巴调度室,调度室
通过音视频矩阵调看视频图像。
(3)媒体管理和发布功能
LCD 显示屏可播放后台中心下发视频、公告、以及便民服务等信息,支持信息的即时和定
时发布。
播放文件格式兼容文本、图片、电视、本地视频、PPT、时钟、HTML、FLASH 等。
(4)自检功能
根据需要自动排风,以保证系统的温湿条件适合工作需要。
具有异常开门告警功能,当电子站牌门非正常开启时,系统自动检测并将信息上传至管理
中心。
通过该集中控制器,可以让调度员在调度室就可以对所有的电子站牌运行状态一目了然,比如
是否开关门异常等情况及时的在后台管理系统上可以看到。
(5)广告功能
LCD 显示屏可分屏播放节目、公告、显示时间、车辆到站信息、公告信息、以及便民服务等。
满足站牌背面灯箱广告需求,可以在背面张贴公益广告和商业广告。
基于 MaaS 的航天大为自动驾驶接驳小巴
207
(6)光控感应功能
电子站牌屏幕具备光感传感器,跟随外界的亮度自行调整屏幕亮度。
如图五所示为航天大为智能电子站牌。
图五:电子站牌
4、MaaS 大数据监控平台
MaaS 大数据监控平台,创新实现了独特的交通出行大数据模型,全力打造智慧交通,智慧出
行平台。MaaS 大数据监控平台不仅能实时监控自动驾驶接驳小巴实时运行数据,了解车辆位置、
自动驾驶状态等关键信息,同时也基于大数据平台技术对出行数据进行筛选分析,准确提供客运量
统计、站点人数占比、小巴运行统计等数据分析,为自动驾驶接驳小巴高效运行提供科学的辅助决
策手段。如图六所示为 MaaS 大数据监控平台。
智能交通产品与技术应用汇编
208
图六:MaaS 大数据监控平台
5、自动驾驶小巴后台管理系统
自动驾驶小巴后台管理系统做为重要组成部分,为自动驾驶接驳小巴安全运行提供了底层服务
支撑,主要功能如下:
(1)处理市民提出的意见建议;
(2)管理自动驾驶接驳小巴线路状态,根据不同的天气、日别制定不同的发车安排,并于微信
小程序,电子站牌信息同步;
(3)对自动驾驶接驳小巴以及安全员进行工作排班;
(4)管理发车时刻表
如图七所示为自动驾驶小巴后台管理系统。
基于 MaaS 的航天大为自动驾驶接驳小巴
209
图七:后台管理系统
二、未来展望
航天大为自动驾驶接驳小巴常态化应用目前还面临舒适性等方面的问题,线路以及站点的排布
也需要进一步优化。下一步,航天大为将发挥车联网建设先发优势,围绕群众出行、行业应用、交
通管理三大领域,不断优化交通基础信息、道路延伸感知,提升自动驾驶小巴接驳应用体验。将来
会进一步增加接驳线路以及接驳站点,与 Robobus、Robotaxi 等优秀自动驾驶商业应用优势互补,
形成开放包容、融合创新、合规发展的产业生态。
智能交通产品与技术应用汇编
210
全息路网解决方案
山东汉鑫科技股份有限公司
一、全息路网概述
目前,在城市道路交通管理开展中仍然面临很多难题,如信息孤岛普遍存在、数据利用率低、
信号控制策略变化难、路口信息协同共享难等。在此背景下延伸出了全息路口和全息路网的概念。
随着自动驾驶“人、车、路、云”和“车路协同”的发展受到越来越多的行业关注和市场投资后,
“全息路网、全息路口”也成为了智慧交通建设的核心场景之一。
全息路口,本质上是通过现有传感器融合的方式,在不同的应用场景产生不同的价值。即通过
部署在路侧的交通信号控制机、各类传感器实现路口本地的车辆、行人、路况的精细化、实时性感
知,构建路口的泛感知体系,从而实现道路交通多维度、多来源、全要素的全息感知。
全息路网,是以全息路口作为最小单元,强调利用边缘计算、高精定位、大数据、云计算等技
术对每一条车道、每一个路口、每一条路的交通状况以及周边基础设施进行实时精准感知。即通过
多个维度解析路口、路段、车辆等交通要素,深入了解个体出行特征,使得交通系统可视、可测、
可控,从而构成城市交通整体感知与治理的完整解决方案。
全息路网的建设也满足了车路协同的建设要求。即使自动驾驶网联汽车没有普及,通过全息路
网应用价值的挖掘,使车路协同路侧设施也具备了经济价值,路侧设施可以先于自动驾驶网联普及
就开始部署,解决了现实情况中“自动驾驶汽车在等路侧设施部署,路侧设施在等自动驾驶网联汽
车普及”这个先有鸡还是先有蛋的问题。
二、建设目标
全息路网通过精准还原路网的机、非、人的交通行为路线,及时发现影响路口交通安全的乱点、
隐患点,通过车辆数量统计和问题原因分析等,实现路网的全方向、全天候、全要素的数字化管理,
为交通管理、隐患排查、交通组织优化、业务应用等提供基础数据支撑。
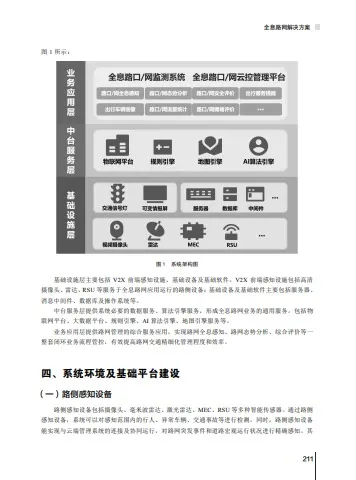
三、系统架构
全息路网架构为三层结构,分别为基础设施层、中台服务层以及业务应用层。系统架构图如
全息路网解决方案
211
图 1 所示:
图 1 系统架构图
基础设施层主要包括 V2X 前端感知设施、基础设备及基础软件。V2X 前端感知设施包括高清
摄像头、雷达、RSU 等服务于全息路网应用运行的路侧设备;基础设备及基础软件主要包括服务器、
消息中间件、数据库及操作系统等。
中台服务层提供系统必要的数据服务、算法引擎服务,形成全息路网业务的通用服务。包括物
联网平台、大数据平台、规则引擎、AI 算法引擎、地图引擎服务等。
业务应用层提供路网管理的综合服务应用,实现路网全息感知、路网态势分析、综合评价等一
整套闭环业务流程管控,有效提高路网交通精细化管理程度和效率。
四、系统环境及基础平台建设
(一)路侧感知设备
路侧感知设备包括摄像头、毫米波雷达、激光雷达、MEC、RSU 等多种智能传感器。通过路侧
感知设备,系统可以对感知范围内的行人、异常车辆、交通事故等进行检测。同时,路侧感知设备
能实现与云端管理系统的连接及协同运行,对路网突发事件和道路宏观运行状况进行精确感知。其
智能交通产品与技术应用汇编
212
中单个路口感知设备部署示意图如图 2 所示。
图 2 路口感知设备部署示意图
1.路侧终端 RSU
RSU 为路侧智能设备,是车与路互联互通的核心设备,可传递车道级高精地图数据、车辆类型
和位置等数据、路侧遗撒物预警、道路施工预警、交通事故预警等信息,以及交通信号控制实时状
态信息,实时对外广播,为网联车辆提供交通安全、交通效率和信息服务应用。
功能亮点:
高精地图实时播报
道路车辆实时播报
异常路况实时播报
交通事故实时播报
交通信控实时播报
2.边缘计算 MEC
作为边缘计算单元,它具有低功耗、高性能的特点,支持交通障碍物检测、交通事件检测、交
通信息检测、交通流量检测、交通气候检测和多传感器融合等功能,提供毫秒级的响应能力。
功能亮点:
道路雷视融合感知
道路交通态势分析
交通信号优化控制
公交优先通行控制
车路协同边缘计算
全息路网解决方案
213
3.摄像头
(1)车辆违章取证
包括违停、逆行、机占非等取证功能,其中违停取证功能可覆盖 250 米以内,并包含车牌抓拍。
(2)路网交通流量检测
包括车流量、排队长度、车道平均速度、车道时间占有率,车道空间占有率等检测功能,检测
范围不小于 200 米。
(3)其他定制化附加功能
为确保感知效果与覆盖范围,支持在每个关键路口或重点路段间部署多个智能感知摄像头,设
备将安装在道路横杆上。
4.毫米波雷达
相比于摄像头,雷达具有不易受天气、光线影响的特点,且定位与目标跟踪更为精准。通过在
路口部署毫米波雷达,能够实时跟踪检测范围内所有目标的行车轨迹,提供目标的坐标、速度、
车长、车宽等信息。同时能够精准地统计各个车道的车流量、平均车速、车道占有率等交通流统
计数据。
5.激光雷达
虽然激光雷达受环境影响较大,但从探测精度上来讲,激光雷达具有探测精度高、探测范围广
及稳定性强等优点,在精确度方面,毫米波雷达的探测距离受到频段损耗的直接制约。另外在行人
感知方面,对周边所有障碍精准的建模方面都不如激光雷达。所以引入激光雷达能大大提升整个感
知系统的性能。
(二)中台服务
平台服务秉持“顶层设计、分步实施、灵活扩展、互联互通”的原则,采用模块化设计,具有
良好的开放性和可扩展性。
1. 物联网平台
物联网平台为路侧设备提供安全可靠的连接通信能力。向下连接海量路侧设备,支撑设备数据
采集上云;向上提供 API,支撑下发指令至路侧设备,实现设备接入、设备管理、远程控制、监控
运维、数据支持等能力。为路侧设备提供安全可靠的设备连接、网络通信、数据传输能力。
物联网平台能够基于城市交通基础设施的互联互通,实现城市交通基础数据的标准化采集和管
理,衔接核心分析能力,解构城市交通系统,做到定量、准确掌握大量车辆轨迹和所有路段路口的
供给、需求、状态。
2. 大数据平台
大数据平台为海量数据分析提供高性能分布式并发处理和存储的能力,加快从海量数据中提取
所需信息。一方面连通各类业务系统,从源头打通数据资源;另一方面实现数据提取、集成到数据
清洗、加工、可视化的一站式分析流程。
大数据平台能够通过对路网的监测区域有序划分,基于路网高精度地图,构建路网可计算模型,
智能交通产品与技术应用汇编
214
摸清重点区域交通出行需求与路网承载量底数,精准复刻各区域历史交通运行情况。
3. 规则引擎
规则引擎可将逻辑代码和业务代码进行解耦,实现将业务决策从应用程序代码中分离出来,并
使用预定义的语义模块编写业务决策。能够高时效、高质量地满足业务响应规则的变化,满足业务
快速、低成本的迭代更新要求。
规则引擎能够对路网重点区域的管控效果进行定量推演,为对比分析不同交通管控措施实施效
果提供有力支持。
五、全息路网应用系统建设
全息路网应用系统建设主要是将云计算、物联网、大数据、全息智能感知、数据通讯传输等技
术有效地集成运用于路网的软件管理系统,为建立实时、准确、安全、高效的“人-车-路-云-管-控”
体系提供应用支撑。
(一)路网全息感知
系统以全息视角监测路网实时运行状态,单个路口如图 3 所示,能够精确到每一条车道、每个
车辆的感知,实时掌握车辆路线、车道流量、车道饱和度、延误停车次数、排队长度等交通管理数
据,以此构建精准认知的数据底座。同时,系统能够对个体车辆进行画像,掌握车辆通行规律,通
过车辆避行提醒,实现主动式拥堵治理。
图 3 路网全息感知
(二)路网态势分析
全息路网从点、线到面,构建从微观个体到宏观系统的认知体系,由路口拓展到路段、路网,
全息路网解决方案
215
实现全时、全量、全要素、全天候感知,消除交通安全的管理盲区及路面异常等问题。路网态势既
包括交通事故、道路施工、特殊天气和路况、慢速或停靠车辆等事件,也包括实时路口的状态、道
路拥堵状况、平均车速等运行统计状况,全息路网的态势分析如图 4 所示。
图 4 全息路网态势分析
(三)路网综合评价
基于历史数据,从路口安全、拥堵、秩序、流量多维度对路网进行综合评价与评分,直观反应
路网交通运行效率及健康水平。包括路网服务水平评价、安全评价、拥堵评价、秩序评价、流量评
价、不同时间周期综合评价等。
1. 路网拥堵监测
系统支持路口溢出、死锁实时预警,可以查看当前正在发生溢出、死锁的路口及拥堵路段。
支持查看发生在路口或路段上的溢出、死锁事件详情,包括事件开始时间、持续时间、路口总
体及各出入口方向的拥堵指数、拥堵距离和平均速度等信息。
2. 路网历史拥堵分析
支持筛选在指定日期范围内发生过溢出、死锁事件的路口及路段,自动统计监视区域的交通流
量、车速、道路占有率等参数,从微观、中观、宏观不同层面,在过去、现在、未来不同的时间尺
度上分析交通拥堵情况。
(四)路网信控评价
实时显示单个或多个路口信号控制方案及当前相位,监测当前信控方案各相位的信控指标,如
图 5 所示;研判信控数据,对信控方案进行评价并给出方案优化建议。通过完善信号调控业务闭环,
提升信控配时优化效率。
智能交通产品与技术应用汇编
216
图 5 诊断评价
(五)路网安全评价
根据车辆轨迹识别路网安全事件,实现事件热力分布及动态演变,回放事件车辆轨迹,针对路
口进行渠化诊断并给出合理建议,提升路网交通安全治理。
车联网标准及测试评价体系研究
217
车联网标准及测试评价体系研究
中国汽车技术研究中心有限公司
秦孔建 方熙宇 姜国凯
一、引言
车联网可实现车车、车人、车路、车网络/云平台等通信连接和高效准确的信息交互,满足目前
智能交通系统在汽车行驶安全、效率提升和信息服务等方面的需求,为汽车向自动驾驶与无人驾驶
系统的平滑演进提供技术支撑。
车联网测试评价体系可分为车联网功性能测试评价体系和车联网信息安全测试评价体系,前者
基于虚拟仿真、软硬件结合仿真、封闭场地测试和开放道路测试等多种测试方法,旨在科学评估不
同环境场景下的车联网通信的性能合规和功能可靠性;后者主要通过审核评估加测试验证的方法,
检测车联网的信息安全是否合规。
二、测评现状
车联网涉及汽车、电子、信息通信、道路交通运输等多行业深度融合,测试评价层面正在加强
跨部门、跨领域测试评价机构协同配合,建立健全智能汽车测试评价体系架构及测试基础数据库,
满足我国复杂道路环境和驾驶行为的测试需要。
目前,车联网领域测评涵盖虚拟仿真、软硬件结合仿真、封闭场地测试和开放道路测试等测评方
法,涵盖整车级、系统级、零部件级测试评价系统。现阶段,各大国家级检测机构也纷纷建立车联网的
测试能力,但是相关的测试评价标准还在制定过程中,且国家暂无准入要求,以研发性测试评价需求为
主。2025 版 CNCAP 已经将 V2X 作为新技术引入,行业组织开展三跨、四跨、新四跨等行业活动,各
地方组织先导区、示范区示范演示活动及各种智能网联比赛,共同推动车联网的落地应用。
三、标准体系现状
车联网产业是汽车、电子、信息通信、道路交通运输等行业深度融合的新型产业,是全球创新
智能交通产品与技术应用汇编
218
热点和未来发展制高点。国家相继发布了《国家车联网产业标准体系建设指南》系列文件,充分发
挥标准在车联网产业生态环境构建中的顶层设计和基础引领作用,涵盖智能网联汽车标准体系、信
息通信标准体系、电子产品与服务标准体系等若干部分。
中国汽车技术研究中心有限公司作为中国汽车行业专业从事标准化研究和应用的科研院所,国
家标准委、工信部授权的汽车标准化归口管理机构,协助制定了智能网联汽车标准体系,并设定两
个阶段目标,智能网联和标准体系如图 1 所示:
1)第一阶段目标,2020 年,初步建立能够支撑驾驶辅助及低级别自动驾驶的智能网联汽车标
准体系;
2)第二阶段目标,2025 年,系统形成能够支撑高级别自动驾驶的智能网联汽车标准体系。现
已完成第一阶段目标。
图 1 智能网联和标准体系
(一)车联网功性能标准情况
2017 年,工业和信息化部、国家标准化管理委员会联合发布《国家车联网产业标准体系建设指
南(智能网联汽车)》,对我国智能网联汽车标准体系做出了系统的规划和部署。
近年来,全国汽标委智能网联汽车分标委(SAC/TC114/SC34)在工信部、国标委等政府
主管部门的领导下,持续贯彻落实《国家标准化发展纲要》《国家车联网产业标准体系建设指
南(智能网联汽车)》及各年度《全国标准化工作要点》《汽车标准化工作要点》等文件,适配
发展需求,聚焦重点领域,强化基础支撑,注重协同创新,依托先进驾驶辅助系统、自动驾驶、
信息安全、网联功能与应用、资源管理与信息服务等专项标准研究工作组,组织国内外骨干单
位开展国内、国际标准制修订与协调,共同推进智能网联汽车标准研究,健全完善智能网联汽
车标准体系,开创了智能网联汽车标准化工作的新局面。部分涉及车联网相关的车联网功性能
标准清单如表 1 所示。
车联网标准及测试评价体系研究
219
表 1 车联网功性能标准清单
序号 对象 标准名称 类别 是否强制 标准状态 预计发布时间
1 — 道路车辆 网联车辆方法论 第 1 部分:
通用信息 国标 GB/T 否 已报批 2023
2 — 道路车辆 网联车辆方法论 第 2 部分:
设计导则 国标 GB/T 否 已报批 2023
2 整车 C-V2X EMC 国际标准
ISO/TR 否 立项 2025
3 部件 车载卫星定位系统技术规范 技术规范 否 公开征求意见 2022
4 部件 车载定位系统技术要求及试验方法 第 1
部分:卫星定位 国标 GB/T 否 预研 2023
5 整车 基于 LTE-V2X直连通信的车载信息交互
系统技术要求 国标 GB/T 否 预研 2023
6 整车 基于网联技术的汽车安全预警类应用场
景技术要求及试验方法 国标 GB/T 否 预研 2023
7 整车 道路车辆汽车天线性能要求和试验方法 国标 GB/T 否 预研 2024
8 整车 智能网联汽车 车用数字钥匙系统技术要
求 待定 否 预研 2024
9 整车 重型车远程排放监控技术规范 行标 HJ 是 22 年 1 月发布 已经发布
10 整车 道路车辆 免提通话和语音交互性能要
求及试验方法 国标 GB/T 否 已立项 2023
11 部件 车载无线通信终端 国标 GB/T 否 已立项 2023
(二)车联网信息安全标准情况
在智能网联汽车标准体系总体框架下,汽标委成立了汽车信息安全工作组,工作组从基础和通
用、共性技术关键系统与部件等 5 个不同层级展开标准子体系的研究工作,并形成了 30 余标准项
目规划。截止前已分 3 批次开展了 10 项标准制定及 5 项标准化需求研究。
1. 信息安全基础和通用类标准
信息安全基础和通用标准类标准是所有汽车信息安全标准的基础。目前,我国已编制并发布了
GB/T 40861-2021《汽车信息安全通用技术要求》国家标准,并且开展了《道路车辆 信息安全工程》
《汽车数字证书应用规范》《汽车密码应用技术要求》等标准的编制工作,预计到 2023 年底,我国将
建成汽车信息安全基础和通用类标准体系。
2. 信息安全共性技术类标准
汽车信息安全共性技术标准包括整车信息安全测试评价标准、共性安全防护技术标准和风险评
估标准:其中《汽车整车信息安全技术要求》已作为强制性国家标准立项,预计 2023 年正式发布实
施;其它共性技术类的标准受限于当前汽车信息安全防护技术发展的局限,大多以标准研究项目的
形式开展标准编制预研,目前已完成了 5 项共性技术类标准的预研工作。
3. 关键系统与部件类标准
零部件是汽车信息安全防护要求落地的关键载体,是信息安全标准工作组前期工作的重点,目
前信息安全工作组已开展了 GB/T 40856-2021《车载信息交互系统信息安全技术要求及试验方法》
智能交通产品与技术应用汇编
220
等六项关键系统与部件类标准的编制工作,其中 3 项标准已正式发布。
4. 信息安全功能应用与管理类标准
信息安全功能应用与管理类标准主要是针对基于车联网关键业务功能的信息安全防护提出的技
术要求和测试方法,目前信息安全标准工作组已开展了 3 项功能应用与管理类标准的编制工作,其
中:《汽车软件升级通用技术要求》已作为国家强制性标准立项并进行了公开征求意见;GB/T
40855-2021《电动汽车远程服务与管理系统信息安全技术要求及试验方法》已正式发布实施;《汽车
信息安全应急响应管理指南》也已完成立项和标准草案编制工作。
5. 车联网信息安全相关标准
汽车信息安全相关标准主要包括与汽车通信的车联网平台和通信信道的信息安全要求标准,和
车联网领域其他标准编制工作组沟通协调后,目前该层级的标准并不单独立项,而是在相应的功能
标准中加入信息安全的要求,例如针对 LTV-V2X 的信息安全要求纳入《基于 LET-V2X 直连通信的
车载信息交互系统技术要求》中进行编制。
四、测评体系及测试方法
(一)车联网功性能测评体系及测试方法
通过网联化技术可实现“人-车-路-云-网-图”的互联,V2X 应用预计 2025 年全球渗透率将超过
50%。网联汽车更像是“四个轮子的超级手机”,而汽车无线性能的要求比手机更加严苛,通信技
术面临新的挑战。
中国汽车技术研究中心有限公司致力于为汽车行业提供立体化的研发与认证服务,推动车联网
技术的规范化落地,建立了一套多层级、多维度、全方位的客观测评体系,推动了 2025 版 CNCAP
主动安全路线图(表 2)的编制,车联网客观测试评价体系如图 2 所示,包括六大板块:
1)以通信性能指标为基础,建立零部件射频测试、车规测试、数据一致性测试和协议一致性测
试能力;
2)以导航定位为技术保障,开展静态定位、动态定位等测试;
3)以功能应用为落地点,开展覆盖乘用车、商用车的安全、效率等功能的应用场景测试;
4)以安全为基础,建立紧急呼叫、智能钥匙等覆盖零部件和整车的全方位测试能力;
5)以交互为核心,搭建人体声学模型为基础的多方言、多场景的语音交互及语音品质测试系统;
6)以座舱娱乐为导向,开展覆盖车机互连、蓝牙、WIFI 等多方位的测试。
(二)车联网信息安全测评体系及测试方法
汽车信息安全检测不同于汽车传统检测项目,需要审核、评估和测试相结合综合验证汽车信息
安全的属性。车联网信息安全测评体系(图 3)包括三个环节,首先依照汽车信息安全建设的体系、
开发流程和技术措施的架构关系,开展针对企业的信息安全管理体系的审核,审核内容包含了企业
信息安全管理体系的建设情况和运行情况;其次针对具体的车型,开展信息安全开发流程的评估,
车联网标准及测试评价体系研究
221
评估包含覆盖车型开发全生命周期的开发过程文档的评估和验证;最后针对车型的信息安全能力,
开展车型信息安全的检测。
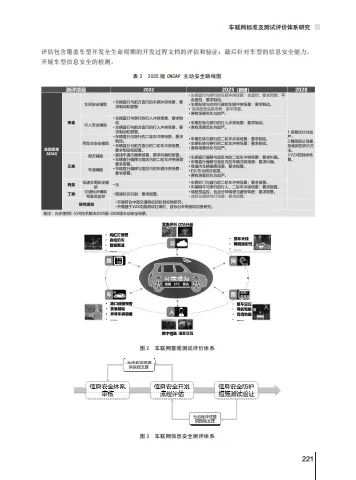
表 2 2025 版 CNCAP 主动安全路线图
图 2 车联网客观测试评价体系
图 3 车联网信息安全测评体系
智能交通产品与技术应用汇编
222
1. 信息安全体系审核
体系审核以有资质的审核员至企业开展体系建设的文审和验证为主,其中技术内容要依据相关
的标准和技术规范进行。在产看企业的体系文档中重点评估体系建设的正确性。除了查看体系文档
之外,还要进行体系运行情况的核查,主要审查体系运行的有效性,核查内容包含了体系设置的各
项活动的内容。当体系建设的正确性和体系运行的有效性出现与标准或技术文档偏差时,应该视偏
差对整体信息安全管理体系的影响开局不符合项。其中不符合又分为单一审查项目不符合和全局不
符合。其中单一审查项不符合可依据低风险、中风险和高风险以及各个风险匹配的技术项目确定单
一审查项目的符合程度。单一审查项不符合程度分为一般不符合和严重不符合。全局不符合分为一
般不符合和严重不符合,其中一般不符合依据单一不符合的整改要求进行整改,整改完成后通过检
测;严重不符合出现时企业应依据严重情况重新建设体系,完成后重新申请检测认证。
2. 信息安全开发流程评估
在开发流程评估中重点查看车型开发流程所涉及的活动的正确性和有效性。其中正确性主要查
看车型开发活动是否与企业的信息安全管理体系相适配,其中车型开发涉及的内容包含:遵循信息
安全管理体系要求、识别和管理车型与供应商相关的风险、确认车型的关键要素,对车型进行详细
的风险评估,适当处理及管理已识别的风险、采取相应的处置措施保护车型不受风险评估中已识别
的风险影响、采取适当和相应的措施,以保护车型用于存储和执行售后软件、服务、应用程序或数
据的专用网络环境、通过适当和充分的测试来验证所实施的安全措施的有效性、针对车型实施相应
措施以监控和抵御针对该车型车辆的网络攻击,提供支持车辆制造商在检测与车型相关的威胁、漏
洞和网络攻击方面的监测能力,提供数据取证能力以便分析企图(未遂)或成功的网络攻击、密码
模块符合国家或者国际通用标准、采取措施避免密码技术可能被破解或应用不充分、无意识行为引
发对车辆的威胁十个部分。在评估中要求企业提供车型开发信息安全报告等文件,现场会对所有文
件进行抽查。当审查的内容出现不符合时,应根据风险情况确认是否影响车型的检测。
3. 信息安全防护措施测试验证
检测测试采用实车测试的方法,覆盖范围包含基础测试项和浮动测试项。其中基础测试项依据
车型开发中涉及的外部接口、内部接口、软件升级安全和数据代码安全四个层级,依据 TARA 分析
的结果确定车型的检测涉及的部件和位置,来判定车型基础的信息安全能力。基础测试项依据测试
的确定的位置采用安全验证和渗透测试相结合的方式开展测试,测试结果出现不符合项既认定为车
型的信息安全存在风险,应进行整改。除基础测试项外,车型应与开发流程评估相结合,挑选企业
声明的安全事项和 TARA 中的高风险项目,开展浮动测试项的测试。浮动测试项以验证为主,主要
验证企业的信息安全声明是否真实有效。当浮动测试项出现不符合项时,除要求企业整改外,还需
进行企业开发流程的评估的复核,已确认评估过程的正确性。
五、车联网测试评价设备
车联网测试评价装备是车联网测试评价技术发展的关键要素之一,是车联网标准体系的重要组
成部分。为贯彻落实《国家标准化发展纲要》《国家车联网产业标准体系建设指南(智能网联汽车)》
车联网标准及测试评价体系研究
223
等文件精神,完善我国智能网联汽车标准体系,汽标委智能网联汽车分标委于 2022 年 4 月决定成立
测试装备专项研究组(图 4),面向先进驾驶辅助系统、自动驾驶、信息安全、网联功能与应用等领
域征集成员单位,由中国汽车技术研究中心有限公司和中国汽车工程研究院股份有限公司联合牵头
开展智能网联汽车测试装备标准体系研究。
图 4 测试装备专项研究组
目前中国汽车技术研究中心有限公司已围绕射频通信、V2X、导航定位、通信天线等车联网的
关键功能和部件开展了测试装备研究建设工作,已初步建成了可满足 V2X、天线性能和信息安全测
评的多功能综合暗室,可支撑全覆盖的车联网标准符合性和研发测评需求,部分车联网核心测试设
备如图 5 所示。
(a)蜂窝、蓝牙、WIFI 测试设备
(b)导航测试设备
智能交通产品与技术应用汇编
224
(c)多功能整车信息安全测试暗室(含信息安全)
图 5 车联网核心测试设备
六、结语
经过多年的发展,车联网在技术功能层面趋于成熟,正在陆续地进入大规模公路测试的阶段。
围绕车联网功性能和信息安全两个核心维度建立的车联网测试评价体系为国内企业开展车辆网测试
验证提供了强力支撑,加速车联网技术的落地推广应用。

