
























城轨通信系统人机界面融合设计
373
台设计需要对通话设备,即音箱和麦克进行管理。当行车调度员不使用时,后台同时监控两个系统,
当有呼入时,在对应窗体进行颜色变化提示和声音提示。当行车调度员选中某一系统时,该系统整
体背景框改变颜色,提示行车调度员目前正在使用的通信系统。此时,另一个系统处于等待接听状
态,保持颜色变化提示。紧急呼叫具有最高的优先级,可中断当前正在进行的通话。
(四)新增功能设计
界面融合后,可新增语音识别功能和书面调令功能,通过并行采集无线列调系统和调度电话系
统的通话语音,进行语音识别和识别内容文字实时显示。行车调度员在发调度命令时,可通过语音
识别的结果判断调度命令是否正确,完整。书面调令也可以根据语音识别的结果为基础,经行车调
度员确认或修改后,完成下发。
四、结束语
本文提出一种通过操作终端人机交互界面融合设计,实现将无线列调系统工作站和调度电话系
统终端整合成一台设备,共用一套音箱麦克的通信外设,可有效精简行车调度员工作台上的设备空
间占用,减少行车调度员的无效操作。此设计方案在 2020 年全国首届城市轨道交通行业职业技能竞
赛行车调度员赛项中进行仿真应用,取得全国各地行车调度员的高度认可。并为无线列调系统和调
度电话系统的软硬件整体融合设计提供一定参考,对城轨运营公司在通信设备人机界面标准化设计
方面提供借鉴意义。
智能交通产品与技术应用汇编
374
高速铁路网运行风险评估与控制关键技术研究
张 蜇 秦 勇
1. 引言
高速铁路运行事故主要由人、设备、环境等因素导致,如人员侵限、异物入侵、设施设备故障
以及恶劣天气等。掌握这些风险因素之间的耦合关系、事故的致因机理、风险辨识与评估方法,对
于高速铁路运营安全至关重要。因此,迫切需要建立高速铁路运行风险评估和控制理论,实现路网
运行风险评估和一体化风险管控,提升高速铁路运行风险分析和调控的能力,为路网运行安全管理
提供决策支持。路网运行风险评估与控制旨在通过分析高速铁路运行风险,提出风险评估指标并进
行路网风险状态评估与控制;通过高铁路网风险因素的致因互联机理分析,科学有效的识辨路网关
键车站和区间,采取合理的铁路运行风险控制策略。本文在高铁路网运行风险“预测-评估-控制”
的统一框架下,结合国家“交通强国”发展战略和《中长期铁路网规划》,瞄准国内外铁路运行系统
安全保障与风险分析与调控研究前沿理论方法,引入新的理念,形成面向成网条件下高速铁路运行
风险评估与控制理论框架,解决路网运行风险因素众多复杂导致的风险状态动态性强和风险管控难
度大的问题。
2. 技术路线
本文研究的技术路线和方法如下图 1 所示:
3. 关键技术研究
(1)基于机器学习的路网运行风险预测技术
路网运行风险预测方法可以采用基于状态或者数据统计的预测方法,对于某些风险或者事故,
与其发生相关的状态数据易于采集;而对于某些事故或者风险,一方面无法获取与其相关的状态数
据,二是基于有限的数据难以确定影响因素,这种情况下可以采取基于数据统计的方法。
高速铁路网运行风险评估与控制关键技术研究
375
基于神经网络的路网运行风险预测:神经网络模型包括输入层、隐含层和输出层,整体结构如
图 2 所示。输入层为路网运行状态变量,输入层神经元数量为输入状态变量的数量,输出层为风险
发生概率。
路网运行风险预测
路网运行风险评估
路网运行风险控制
基于状态的风险预测模型 基于时序数据统计的风险预测模型
线性回归 神经网络 回归树 NAR神经网络 LSTM神经网络
可靠性 可用性 可恢复性
事故致因网络 风险关系测度 风险控制策略
安全性
图 1 高速铁路网运行风险分析与控制技术路线
图 2 基于神经网络的路网运行风险预测模型
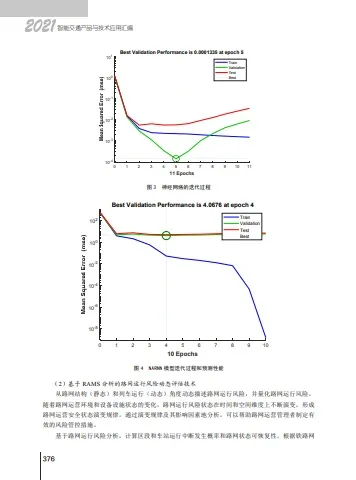
基于天气状态的路网运行降雨风险预测:以天气对运行的影响为例,构建基于状态的路网运行
降雨风险预测模型。根据数据调研结果,雨雪可能会导致列车降速甚至中断运行。因此,可以将气
象变量包括气温、天气和风力状况作为影响路网运行的环境变量,如[气温 18 摄氏度,天气阴转多
云,风力南风 3 级],也就是预测模型的输入,将风险发生概率作为模型的输出。图 3 为神经网络模
型的寻优轨迹,当迭代至第 5 次时即可达到最小的均方误差。
基于时序数据的路网风险预测:对于无法获取影响状态的风险类型,可以采用时序数据统计分
析的方法预测路网事故发生的数量。本文采用非线性自回归神经网络(NARNN)和 LSTM 神经网
络模型建立了路网事故数量预测模型,通过比较两个模型的预测表现发现 NARNN 预测效果优于
LSTM 神经网络,图 4 为 NARNN 模型迭代过程和预测性能。
智能交通产品与技术应用汇编
376
0 1 2 3 4 5 6 7 8 9 10 11
11 Epochs
10-4
10-3
10-2
10-1
100
101 Best Validation Performance is 0.0001335 at epoch 5
Train
Validation
Test
Best
图 3 神经网络的迭代过程
0 1 2 3 4 5 6 7 8 9 10
10 Epochs
10-8
10-6
10-4
10-2
100
102
Best Validation Performance is 4.0676 at epoch 4
Train
Validation
Test
Best
图 4 NARNN 模型迭代过程和预测性能
(2)基于 RAMS 分析的路网运行风险动态评估技术
从路网结构(静态)和列车运行(动态)角度动态描述路网运行风险,并量化路网运行风险。
随着路网运营环境和设备设施状态的变化,路网运行风险状态在时间和空间维度上不断演变,形成
路网运营安全状态演变规律。通过演变规律及其影响因素地分析,可以帮助路网运营管理者制定有
效的风险管控措施。
基于路网运行风险分析,计算区段和车站运行中断发生概率和路网状态可恢复性。根据铁路网
高速铁路网运行风险评估与控制关键技术研究
377
拓扑结构和列车流,构建铁路运输功能网,并提出网络效率和能力损失计算方法。最后,根据风险
发生概率和网络影响结果分析路网安全状态,识别安全关键车站和区间,并评估风险等级。路网运
行风险评估模型技术框架如图 5 所示。
铁路运输系统
历史故障和事故数据
网络拓扑结构
类型1
列车流
运输功能网
类型2
概率P(1) 概率P(2)
..
.
..
.
LKJ数据 列车时刻表
效能指标 能力指标
效能损失
计算EL
能力损失
计算CL
风险量化分析
R1=EL*P*V R2=CL*P*V
路网运行中断与可恢复性 风险指标计算
可恢复性
计算v
运行中断概率和可
恢复性计算
风险评估分级
R1=EL*P*V R2=CL*P*V
聚类与分级算法
图 5 路网运行风险评估模型技术框架
(3)面向事故预防的路网运行风险控制技术
从“人-机-环-管”角度,提出铁路运行风险因素,构建铁路运行事故致因网络,并计算网络中
节点连接权重、概率和距离,实现不同风险因素关联性测度。从事故预防角度,构建基于事故致因
网络的铁路运行风险控制模型,通过比较不同控制模型的事故预防效果,提出需要控制的关键风险
因素。图 6 为铁路运行事故致因网络以及不同方法的控制效果比较。
图 6 面向事故预防的路网运行风险控制
智能交通产品与技术应用汇编
378
(4)路网运行风险分析与控制系统研制
基于路网风险预测、评估和控制等关键技术的突破,研制了路网运行风险与控制系统,该系统
具备路网风险数据查询、路网 RAMS 指标分析以及风险控制等 3 个主要功能。图 7 为路网运行风险
分析与控制系统界面。
图 7 路网运行风险分析与控制系统
4. 结论
首先,通过分析路网运行状态和风险之间的关系,建立了基于神经网络的路网运行风险预测模
型,对不同致因的路网运行事故发生数量和概率进行预测。其次,风险发生导致运行中断的概率和
风险对路网状态影响角度出发,提出了路网运行风险 RAMS 评价指标计算方法,构建了基于 RAMS
和 K-means 聚类分析的路网运行风险评估分级模型。然后,基于铁路运行风险控制目标和风险管控
成本约束,提出基于事故致因网络的铁路运行风险控制模型和算法,得出通过安全管理来消除的关
键风险因素。最后,基于以上基础理论和关键技术研究,研制了路网运行风险分析与控制系统,帮
助高铁运行安全管理部门评估路网运行风险状态,提供风险控制策略。
FAOTS 型全自动列车控制系统解决方案与应用
379
FAOTS 型全自动列车控制系统解决方案与应用
周公建 李建全
卡斯柯信号有限公司
FAOTS 型全自动列车控制系统是卡斯柯信号有限公司全自主研发的面向海外用户的全自动列
车操控系统,安全等级达到 SIL2。该系统采用适合于海外项目的组态化设计,灵活适配当地用户习
俗及操作习惯;功能方面不仅可实现对列车的自动唤醒、自动运行、自动洗车以及存车休眠等,还
集成了最新的区间入侵检测、智能化列车区间运行监视和区间失电检测等综合联动功能,满足海外
项目集中化控制(Integrated Central Centre)的应用场景,提升调度决策效率,完全适配海外项目的
人员精简化的智能运营要求。
1、FAOTS 型全自动列车控制系统说明
卡斯柯信号有限公司在轨道交通行业中有着 34 年的列车运行控制技术积累,所研制的自动列车
监控系统(ATS)已成功应用于国内数十条地铁线路。2012 年底,卡斯柯作为总承包方开通了北京
地铁 6 号线以 ATS 为核心的综合调度系统,在国内首次集成十多个跨专业调度监控类系统。
基于这些基础,卡斯柯研制的全自动列车操控系统(GOA4),成功应用于香港地铁南岛线、澳
大利亚悉尼西北线等已开通运营项目,目前正在实施的项目还包括澳大利亚悉尼西南线项目,墨西
哥轨道交通项目。这标志着该系统得到业界认可,同时,借助于海外项目获取的全新运营理念和项
目实施经验,有力推动国内同类产品的升级换代,确保我国的轨道交通列车运行控制技术始终站在
全球的技术前沿。
FAOTS 系统的研发严格遵循 EN50126、EN50128 和 EN50129 相关标准和流程,安全、测试和
质量独立于开发工作,项目开发之初就与德国技术监督协会(TUV)签署安全认证合同,采用开发
认证同步进行的方式,使项目的开发从开始到结束全过程都在第三方的安全监督下进行,保证系统
本身和开发过程的安全性。
2、FAOTS 型全自动列车控制系统架构
ATS 系统作为地铁信号系统的重要组成部分服务于行车调度领域,为行调人员提供良好的可视
化界面,使其能够即时了解现场信号设备状态和列车运行情况,控制列车按计划运行,方便地处理
各种突发事件。
ATS 采用区域集中式架构,分为中心和车站子系统,系统架构分别如下图 1 所示:
智能交通产品与技术应用汇编
380
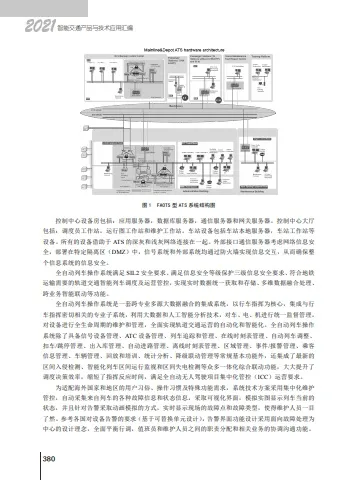
图 1 FAOTS 型 ATS 系统结构图
控制中心设备房包括:应用服务器,数据库服务器,通信服务器和网关服务器。控制中心大厅
包括:调度员工作站,运行图工作站和维护工作站。车站设备包括车站本地服务器,车站工作站等
设备。所有的设备借助于 ATS 的深灰和浅灰网络连接在一起。外部接口通信服务器考虑网络信息安
全,部署在特定隔离区(DMZ)中,信号系统和外部系统均通过防火墙实现信息交互,从而确保整
个信息系统的信息安全。
全自动列车操作系统满足 SIL2 安全要求、满足信息安全等级保护三级信息安全要求、符合地铁
运输需要的轨道交通智能列车调度及运营管控,实现实时数据统一获取和存储、多维数据融合处理、
跨业务智能联动等功能。
全自动列车操作系统是一套跨专业多源大数据融合的集成系统,以行车指挥为核心,集成与行
车指挥密切相关的专业子系统,利用大数据和人工智能分析技术,对车、电、机进行统一监督管理,
对设备进行全生命周期的维护和管理,全面实现轨道交通运营的自动化和智能化。全自动列车操作
系统除了具备信号设备管理、ATC 设备管理、列车追踪和管理、在线时刻表管理、自动列车调整、
扣车/跳停管理、出入库管理、自动进路管理、离线时刻表管理、区域管理、事件/报警管理、乘客
信息管理、车辆管理、回放和培训、统计分析、降级联动管理等常规基本功能外,还集成了最新的
区间入侵检测、智能化列车区间运行监视和区间失电检测等众多一体化综合联动功能,大大提升了
调度决策效率,缩短了指挥反应时间,满足全自动无人驾驶项目集中化管控(ICC)运营要求。
为适配海外国家和地区的用户习俗、操作习惯及特殊功能需求,系统技术方案采用集中化维护
管控,自动采集来自列车的各种故障信息和状态信息,采取可视化界面,模拟实图显示列车当前的
状态,并且针对告警采取动画模拟的方式,实时显示现场的故障点和故障类型,使得维护人员一目
了然。参考各国对设备告警的要求(基于可替换单元设计),告警界面功能设计采用面向故障处理为
中心的设计理念,全面平衡行调,值班员和维护人员之间的职责分配和相关业务的协调沟通功能。
FAOTS 型全自动列车控制系统解决方案与应用
381
3、FAOTS 系统的创新点
FAOTS 系统在研制过程中,充分吸取了传统有人驾驶项目的实施经验,同时在面向海外用户需
求的基础上,重新设计了全自动列车操作系统,并引入了一系列的创新点:
1)区域集中化的系统架构
该系统在架构设计上参考了国内分散自律的主流 ATS 设计架构,改为采用更加符合海外项目要
求的“区域集中化“的系统架构设计,实现集中式轻量级部署,具备高度的系统配置灵活性和成本
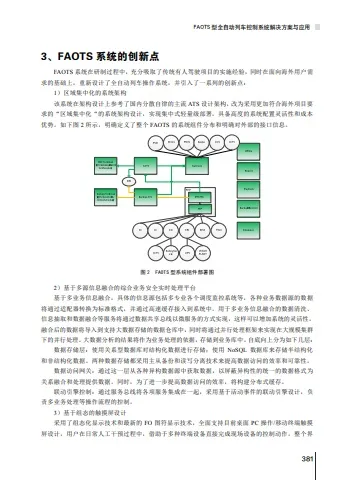
优势。如下图 2 所示,明确定义了整个 FAOTS 的系统组件分布和明确对外部的接口信息。
图 2 FAOTS 型系统组件部署图
2)基于多源信息融合的综合业务安全实时处理平台
基于多业务信息融合,具体的信息源包括多专业各个调度监控系统等,各种业务数据源的数据
将通过适配器转换为标准格式,并通过高速缓存接入到系统中。用于多业务信息融合的数据清洗、
信息抽取和数据融合等服务将通过数据共享总线以微服务的方式实现,这样可以增加系统的灵活性。
融合后的数据将导入到支持大数据存储的数据仓库中,同时将通过并行处理框架来实现在大规模集群
下的并行处理。大数据分析的结果将作为业务处理的依据,存储到业务库中。自底向上分为如下几层:
数据存储层:使用关系型数据库对结构化数据进行存储;使用 NoSQL 数据库来存储半结构化
和非结构化数据。两种数据存储都采用主从备份和读写分离技术来提高数据访问的效率和可靠性。
数据访问网关:通过这一层从各种异构数据源中获取数据,以屏蔽异构性的统一的数据格式为
关系融合和处理提供数据。同时,为了进一步提高数据访问的效率,将构建分布式缓存。
联动引擎控制:通过服务总线将各项服务集成在一起,采用基于活动事件的联动引擎设计,负
责多业务处理等操作流程的控制。
3)基于组态的触摸屏设计
采用了组态化显示技术和最新的 FO 图符显示技术,全面支持目前桌面 PC 操作/移动终端触摸
屏设计,用户在日常人工干预过程中,借助于多种终端设备直接完成现场设备的控制动作。整个界
智能交通产品与技术应用汇编
382
面根据当地国家的语言、文化、法律、习惯要求,对界面布局及图标设计进行不断的优化和改进,
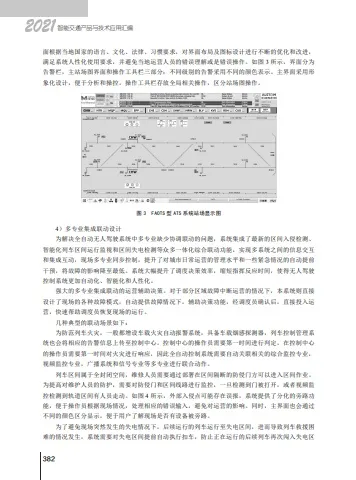
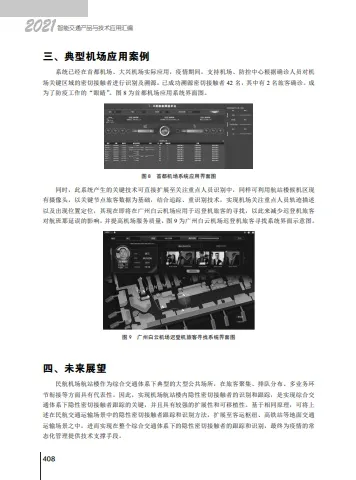
满足系统人性化使用要求,并避免当地运营人员的错误理解或是错误操作。如图 3 所示,界面分为
告警栏,主站场图界面和操作工具栏三部分;不同级别的告警采用不同的颜色表示。主界面采用形
象化设计,便于分析和操控。操作工具栏存放全局相关操作,区分站场图操作。
图 3 FAOTS 型 ATS 系统站场显示图
4)多专业集成联动设计
为解决全自动无人驾驶系统中多专业缺少协调联动的问题,系统集成了最新的区间入侵检测、
智能化列车区间运行监视和区间失电检测等众多一体化综合联动功能,实现多系统之间的信息交互
和集成互动,现场多专业同步控制,提升了对城市日常运营的管理水平和一些紧急情况的自动提前
干预,将故障的影响降至最低。系统大幅提升了调度决策效率,缩短指挥反应时间,使得无人驾驶
控制系统更加自动化、智能化和人性化。
强大的多专业集成联动的运营辅助决策。对于部分区域故障中断运营的情况下,本系统则直接
设计了现场的各种故障模式,自动提供故障情况下,辅助决策功能,经调度员确认后,直接投入运
营,快速帮助调度员恢复现场的运行。
几种典型的联动场景如下:
为防范列车火灾,一般都增设车载火灾自动报警系统,具备车载烟感探测器,列车控制管理系
统也会将相应的告警信息上传至控制中心。控制中心的操作员需要第一时间进行判定。在控制中心
的操作员需要第一时间对火灾进行响应,因此全自动控制系统需要自动关联相关的综合监控专业,
视频监控专业,广播系统和信号专业等多专业进行联合动作。
列车区间属于全封闭空间,维修人员需要通过部署在区间隔断的防侵门方可以进入区间作业。
为提高对维护人员的防护,需要对防侵门和区间线路进行监控,一旦检测到门被打开,或者视频监
控检测到轨道区间有人员走动。如图 4 所示,外部入侵点可能存在误报,系统提供了分化的旁路功
能,便于操作员根据现场情况,处理相应的错误输入,避免对运营的影响。同时,主界面也会通过
不同的颜色区分显示,便于用户了解现场是否有设备被旁路。
为了避免现场突然发生的失电情况下,后续运行的列车运行至失电区间,进而导致列车救援困
难的情况发生,系统需要对失电区间提前自动执行扣车,防止正在运行的后续列车再次闯入失电区
FAOTS 型全自动列车控制系统解决方案与应用
383
域。同时对于已经进入该区间的列车执行停车控制,尽量防止列车进入过多进入失电区域,从而尽
可能避免机车救援。
图 4 联动控制点状态显示图
5)最严格的安全认证要求
为满足海外用户对功能安全的严苛要求,专门设计了安全交互协议,如下图 5 所示,确保整个交
互的可靠性和防止人为操作错误。系统研发严格按照 EN50128:2011 标准进行,并增加了数据审核,
应用工具方面的证据收集,细化操作系统接口函数的分析,同时除了侧重流程上的要求,更加强化了
功能安全的设计要求,最终顺利通过了独立第三方 SIL2 评估认证,树立了同类产品的研发标杆。
6)完善的信息安全方案:
为应对日益增强的信息安全威胁,系统强化信息安全框架建设,在应用安全方面采用基于双因
素认证的身份鉴别技术,建立面向角色和控制区域的权限管理体系、并通过动态密钥协商算法、加
密算法和消息认证码来确保通信的完整性和保密性。
1 s t requ est
CBI
SIG
fu nction Op erato r
1 s t rep ort
2 n d request
F in al rep ort
1s t control
(pre para tion)
2n d c ontrol
(confirm a tio n)
Ack
(preparation)
Ack
(confirm ation)
图 5 FAOTS 型安全交互图
智能交通产品与技术应用汇编
384
7)基于告警的设备维护模式
提供了丰富的可视化车载全方位信息的展示页面,所有的告警均经过精心的设计,真正实现了
用户基于告警来进行设备的维护,强大的车次窗信息显示,实时反馈无人驾驶列车的运行状态,一
旦现场有任何故障都会立刻以最明显的状态显示。图 6 就是整个车辆信息的监控画面,仿照列车的
外形,根据设备的布置位置,形象化罗列了车辆的设备运行状态,极大方便了现场维护人员的维护。
图 6 FAOTS 型车辆信息监控图
4、FAOTS 系统在海外项目中的应用
本项目研发的全自动列车操作系统已成功应用于香港地铁南岛线、澳大利亚悉尼西北线等已开
通全自动无人驾驶运营项目,不仅实现了对列车的自动唤醒、自检、自动出库回库、正线运行、自
动洗车以及存车休眠等各种工况的全自动化管理,还可以实现对线路故障情况下的降级运营支持,
大大提高了系统的自动化智能化程度和安全性,提高了运营和维护效率,得到各地业主的一致好评。
同时,借助于海外项目获取的全新运营理念和项目实施经验,有力推动国内同类产品的升级换代,
确保我国的轨道交通列车运行控制技术始终站在全球的技术前沿。
普速铁路调度集中系统区域集控模式的创新应用
385
普速铁路调度集中系统区域集控模式的
创新应用
应志鹏 1
张 涛 1
王壮锋 1
张春德 2
1. 中国铁道科学研究院集团有限公司通信信号研究所
2. 中国铁路北京局集团有限公司
1、概述
现有国铁集团普速铁路使用的分散自律调度集中系统(CTC),其既适用于集控站(无行车人员
车站),也适用于非集控站(有行车人员车站),通过对现行运输过程的优化,实现列车运行、调车
作业的行车指挥自动化,实现中间车站行车岗位无人化。但就实际应用来看,调度集中主要适用于
作业单一、计划性较强的区段,例如高铁以及朔黄铁路为代表的、开行直达重载列车的货运线路,
也适用于调车作业较少的客货混跑线路,例如太中(银)铁路等。
对于其它复杂站场,现创新提出区域集控模式,将整个普速铁路调度指挥系统分为两个层级,
全路综合调度指挥中心和区域调度指挥中心。全路综合调度指挥中心主要是起监视和协调作用,必
要时接管指定区域的调度指挥工作。区域调度指挥中心负责日常列车的调度指挥工作,通过各专业
调度台向基层发布调度命令,基层站段根据调度命令组织实施。
该模式下,全路调度指挥中心负责协调、管理和监督各区域调度中心的工作,在正常情况下只
备份区域调度中心的数据,只有在区域调度指挥不能正常工作等特殊情况下才接管区域调度的工作,
直接指挥现场的行车组织工作。按区域设置调度指挥系统与既有线调度指挥设置方式接近,能够很
好地与既有线调度相结合,同时易于处理枢纽地区各方向列车的衔接问题。目前我国高速铁路处于
发展的初步阶段,已经开通的高速铁路主要采用这种模式,将高速铁路的调度指挥就地纳入既有线
调度指挥中心,分地域进行高铁的调度指挥工作。
2、具体实施方案
衢宁铁路是中国境内一条连接浙江省衢州市与福建省宁德市的国铁Ⅰ级客货共线单线电气化铁
路。2014 年 12 月 23 日,衢宁铁路正式开工建设。2020 年 5 月 12 日,衢宁铁路铺轨全线贯通。2020
年 9 月 27 日,衢宁铁路正式开通运营。起自浙江省衢州市沪昆铁路衢州站,向南经龙游、遂昌、松
智能交通产品与技术应用汇编
386
阳、龙泉、庆元,穿百丈山进入福建省,经松溪、政和、建瓯、屏南、周宁至宁德市杭深铁路宁德
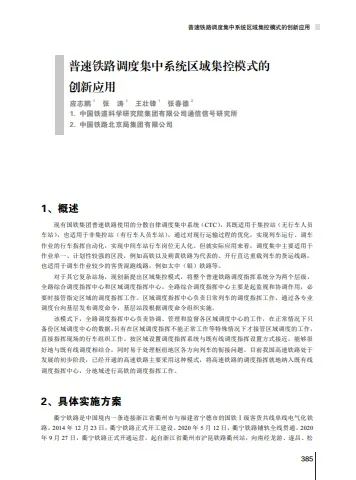
站,正线全长 382.5 千米,目前在所经过的上海、南昌两局进行相关集控试点。
1)上海局管段区域集中方案
上海铁路局在 2020 年 9 月上旬在衢宁铁路试用区域集中,采用 1 个集中站带 14 个非营业站的
方式,由主调和助调两个人控制。试验区段衢宁线上海局管段共有衢州、衢州东站等 16 个车站,全
部采用区域集中 CTC 系统,其中衢州东、衢州普速场为 CTC2.0 系统,归属于既有沪昆四台;衢宁
线新建 14 个车站为区域集中 CTC 系统,调度指挥归属衢宁台管辖,松阳站设置中心集控台,管辖
14 个车站 CTC 功能。
在既有 CTC 基础结构上,在衢宁线松阳站新增车站服务器以及中心站集控台设备。车站服务器
配置独立数据库,用于存储松阳站中心集控台计划、调度命令等信息。中心站集控台参照既有 CTC
调度台设置中心站主调(双屏)、中心站助调(双屏)、中心站大调监(四屏)。其中中心站主调设置
控显、运行图、调令程序,中心站助调设置控显、调令、运行图复试程序,中心站大调监设置控显
程序。硬件系统结构如下图所示。
图 1 硬件系统结构
在行车组织方面,上海段行车组织按照中国铁路上海局集团有限公司运输部拟发文件执行,具
体内容包括:
(1)在分散自律条件下,一个车站通过 CTC 设备集中办理多个车站(线路所)作业的行车组织
方式称为 CTC 中心站集控模式,又称为 CTC 区域集中。
(2)集中办理多个车站(线路所)行车作业的车站称为中心站。中心站设车站值班员、助理值
班员(内勤),均由车务具有车站值班员职名的人员担任,负责办理区域集控站的行车组织工作。
(3)纳入中心站集中控制的车站(线路所)称为区域集控站。区域集控站根据作业需要,设车
务应急值守人员,由车务具有车站值班员职名的人员担任。区域集控站 CTC 车务终端、固定用户接
普速铁路调度集中系统区域集控模式的创新应用
387
入交换机及调度通信终端(FAS 台)、计算机联锁操作终端保留,处于工作状态。
(4)仅办理列车会让的车站按无人站管理,不设车务行车人员和管理人员。
(5)在设有综合维修工区并配备轨道车的车站设应急行车点,设应急行车人员,负责在车站控
制和各种非正常情况下赶赴无人站负责行车组织工作。应急行车人员必须具备相应的岗位资格。
(6)CTC 区域集控站转入非常站控后,车站在微机联锁设备上进行信号操作,CTC 终端设备后
备具备 TDCS 功能。转入车站操作或非常站控后,车站的行车工作由各车站的车站值班员统一指挥。
(7)在人员配备方面,在行车组织指挥基本原则不变的情况下,衢宁线上海局管段 CTC 区域集
中各站(线路所)列车运行调整计划、区间列车运行组织由列车调度员负责,相关制度按既有规定
执行。中心站开通 CTC 区域集中功能,中心站车站值班员负责区域集控车站(线路所)行车作业。
2)南昌局管段区域集中方案
衢宁线南昌局管段共有松溪(办客)、茶平等 15 站,且全部纳入 CTC 控制。其中政和、屏南、
宁德北为中心站。松溪、茶平、小绍、建瓯东、地州、大碑、龟潭、礼门、周宁、支提山、漳湾、
漳湾三屿为区域集控站,其中松溪、建瓯东、周宁、支提山、漳湾站为应急值守站(有人站),茶平,
小绍,地州,大碑,龟潭,礼门、漳湾三屿为无人站(不设车务人员)。其中:松溪、茶平、小绍、
建瓯东站由政和站控制;地州、大碑、龟潭、礼门站由屏南站控制;周宁、支提山、漳湾站由宁德
北站控制。
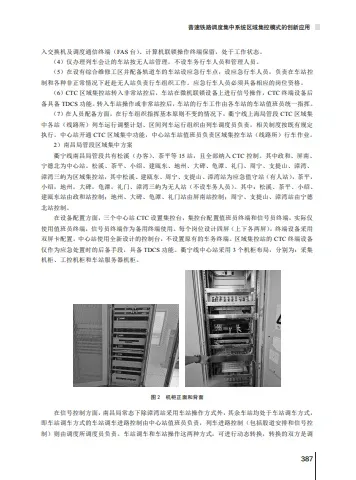
在设备配置方面,三个中心站 CTC 设置集控台,集控台配置值班员终端和信号员终端,实际仅
使用值班员终端,信号员终端作为备用终端使用。每个岗位设计四屏(上下各两屏),终端设备采用
双屏卡配置。中心站使用全新设计的控制台,不设置原有的车务终端。区域集控站的 CTC 终端设备
仅作为应急处置时的后备手段,具备 TDCS 功能。衢宁线中心站采用 3 个机柜布局,分别为:采集
机柜、工控机柜和车站服务器机柜。
图 2 机柜正面和背面
在信号控制方面,南昌局常态下除漳湾站采用车站操作方式外,其余车站均处于车站调车方式,
即车站调车方式的车站调车进路控制由中心站值班员负责,列车进路控制(包括股道安排和信号控
制)则由调度所调度员负责。车站调车和车站操作这两种方式,可进行动态转换,转换的双方是调
智能交通产品与技术应用汇编
388
度员和中心站值班员,即在施工等情形下,可将所有车站下放到车站操作方式,由中心站值班员负
责管辖车站的股道安排和列车、调车进路办理。
在通信方面,以宁德北站和漳湾三屿站为例,漳湾三屿站属于宁德北中心站管辖,且为车站操
作方式,即列车、调车进路均由宁德北站值班员办理。宁德北站设置有专用调机,宁德北站本站的
调车作业可以通过平调系统解决,而漳湾三屿站需要调车时,中心站值班员只能通过 GSM-R 网电
话与司机或调车组进行点对点通信,无法实现类似平调系统的广播对讲。
3)方案差异比较
路局
项目 上海局 南昌局 备注
中心站集控规模 1+13,管内仅设置一个中心站(松
阳站)
基本为 1+4,管内设置三个中心
站(政和、屏南、宁德北)
上海局相当于助调台整体下
移
调度所调度台 单设衢宁台,但由既有沪昆四台
助调员代管 未单设台,纳入既有温福台 调度台未新增加人员
中心站是否保留车务终端 除了集控台,还保留了松阳站车
务终端
集控台代替本站车务终端,中心
站不保留原车务终端
CTC 操作方式 无人站为中心操作方式,其余站
为车站调车方式
除漳湾车站操作方式外,其余各
站为车站调车
上海局调度所相当于 TDCS
调度台,只管计划时刻,不管股
道运用和信号控制
区域集控站车务终端功能 保留调车进路控制权限 TDCS 功能,无信号控制权限
通信方式 在区域集控站本站进行调车进路
办理,可以利用平调系统
在中心站集中办理调车进路,中
心站本站自身可利用平调系统,其
余站用 GSM-R 网手机通信
3、结论
CTC 技术的推广应用需要现场条件和需求紧密结合。在普速线,特别是客货混跑情况下,许多
特殊站场对 CTC 存在多样性的合理需求,在这种情况下,通过部署区域集控,创新组织模式,合理
分配工作量,易于处理枢纽地区各方向列车的衔接问题,在一定程度上能够解决调车组和集控值班
员的通信问题,最终实现现有 CTC 中心和车站的管控平衡。
无人驾驶中低速磁悬浮的车控一体化研究
389
无人驾驶中低速磁悬浮的车控一体化研究
郭西平 孙思南 周 星
新誉庞巴迪信号系统有限公司
中低速磁悬浮作为中低运量轨道交通中的一种,具有低碳节能、噪声低、 无污染、 绿色环保,
性能安全可靠等突出特点,正成为未来城市轨道交通系统的主要发展方向之一;而无人驾驶中低速
磁浮列车的智能化、无人化控制作为整个系统中最为主要的部分,也成为行业内各个系统集成商的
主要技术攻关方向。
基于控制智能化、设备集约化等要求,本文提出一种全自动无人驾驶中低速磁悬浮的车控一体
化系统研究,即车载运控子系统;该子系统打破了传统的信号系统与车辆控制系统分离设置的方式,
具有控制高度智能化,设备高度集成化,接口简单易维护等特点。
一、研究背景
当前,在城市轨道交通领域(地铁、轻轨及中低速磁悬浮等),全自动运行列车的运行控制功能
主要由信号 CBTC 系统及车辆 TCMS 系统来实现,CBTC-基于无线通信的列车自动控制系统,包
含 ATP-自动列车防护子系统与 ATO-自动列车运行子系统;TCMS-列车控制管理系统,用于与
所有列车子系统进行接口,管理、控制列车运行过程中的车辆数据;车载 ATP 子系统作为 SIL4 等
级的安全子系统负责列车运行安全防护功能,如牵引使能,紧急制动,车门使能等;车载 ATO 子系
统与车辆 TCMS 系统作为 SIL0 或 SIL2 等级的子系统,相互接口、配合,共同完成列车运行非安全
功能,例如牵引力、制动力控制,车门开、关控制,列车空调、照明、乘客广播控制等;主流全自
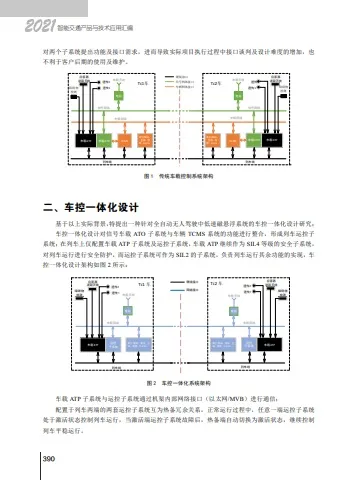
动运行系统车载控制架构示例如图 1 所示:
从以上架构中可以看出,车载 ATP 子系统作为安全子系统,可直接与车辆牵引、制动及门控等
车辆单元通过硬线进行接口,控制其实现列车安全功能;而对于列车非安全功能来说,由于分别由
车载 ATO、车辆 TCMS 两部分来执行,且两部分之间需要单独设计接口来实现部分非安全功能,这
样就导致列车非安全架构较为复杂,设备较多,不利于在中低速磁悬浮列车内的安装;且由于车载
ATO 与车辆 TCMS 分别由信号系统供应商及车辆供应商两家负责,业主在项目招标阶段也需要分别
智能交通产品与技术应用汇编
390
对两个子系统提出功能及接口需求,进而导致实际项目执行过程中接口谈判及设计难度的增加,也
不利于客户后期的使用及维护。
车载ATP 车载ATO TCMS
牵引/制动、
空调、照
明、PIS/PA...
TCMS 车载ATO 车载ATP 牵引/制动、
空调、照
明、PIS/PA...
列车线
车辆网络
信号网络 信号网络
车辆网络
列车线
速传1
速传2
应答器
读取天线
电台
车载天线
电台
车载天线
应答器
读取天线
速传1
速传2
硬线接口
信号网络接口
障碍物 车辆网络接口
检测
障碍物
检测
Tc1车 Tc2车
图 1 传统车载控制系统架构
二、车控一体化设计
基于以上实际背景,特提出一种针对全自动无人驾驶中低速磁悬浮系统的车控一体化设计研究;
车控一体化设计对信号车载 ATO 子系统与车辆 TCMS 系统的功能进行整合,形成列车运控子
系统;在列车上仅配置车载 ATP 子系统及运控子系统,车载 ATP 继续作为 SIL4 等级的安全子系统,
对列车运行进行安全防护,而运控子系统可作为 SIL2 的子系统,负责列车运行其余功能的实现,车
控一体化设计架构如图 2 所示:
车载ATP 运控
子系统
牵引/制动、悬浮、空
调、照明、PIS/PA... 车载ATP 运控
子系统
牵引/制动、悬浮、空
调、照明、PIS/PA...
列车线
车载网络 车载网络
列车线
速传1
速传2
应答器
读取天线
电台
车载天线
电台
车载天线
应答器
读取天线
速传1
速传2
硬线接口
障碍物 网络接口
检测
障碍物
检测
Tc1 车 Tc2 车
图 2 车控一体化系统架构
车载 ATP 子系统与运控子系统通过机架内部网络接口(以太网/MVB)进行通信;
配置于列车两端的两套运控子系统互为热备冗余关系,正常运行过程中,任意一端运控子系统
处于激活状态控制列车运行,当激活端运控子系统故障后,热备端自动切换为激活状态,继续控制
列车平稳运行。
无人驾驶中低速磁悬浮的车控一体化研究
391
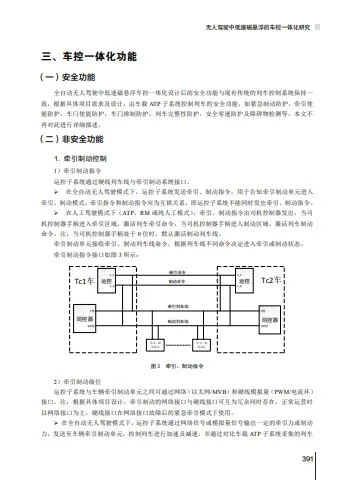
三、车控一体化功能
(一)安全功能
全自动无人驾驶中低速磁悬浮车控一体化设计后的安全功能与现有传统的列车控制系统保持一
致,根据具体项目需求及设计,由车载 ATP 子系统控制列车的安全功能,如紧急制动防护,牵引使
能防护,车门使能防护,车门抑制防护,列车完整性防护,安全零速防护及障碍物检测等,本文不
再对此进行详细描述。
(二)非安全功能
1. 牵引制动控制
1)牵引制动指令
运控子系统通过硬线列车线与牵引制动系统接口。
在全自动无人驾驶模式下,运控子系统发送牵引、制动指令,用于告知牵引制动单元进入
牵引、制动模式;牵引指令和制动指令应为互锁关系,即运控子系统不能同时发出牵引、制动指令。
在人工驾驶模式下(ATP、RM 或纯人工模式),牵引、制动指令由司机控制器发出,当司
机控制器手柄进入牵引区域,激活列车牵引命令,当司机控制器手柄进入制动区域,激活列车制动
命令。注:当司机控制器手柄处于 0 位时,默认激活制动列车线。
牵引制动单元接收牵引、制动列车线命令,根据列车线不同命令决定进入牵引或制动状态。
牵引制动指令接口如图 3 所示:
司控器
运控
司控器
运控
牵引列车线
制动列车线
牵引命令
制动命令
C_P
C_B
C_P
C_B
P位
B/0位
P位
B/0位
牵引、制
动单元
牵引、制
动单元
Tc1车 Tc2车
图 3 牵引、制动指令
2)牵引制动级位
运控子系统与车辆牵引制动单元之间可通过网络(以太网/MVB)和硬线模拟量(PWM/电流环)
接口。注:根据具体项目设计,牵引制动的网络接口与硬线接口可互为冗余同时存在,正常运营时
以网络接口为主,硬线接口在网络接口故障后的紧急牵引模式下使用。
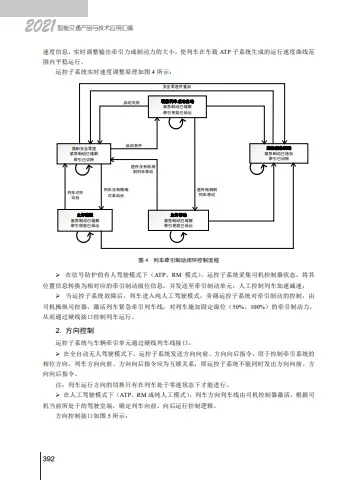
在全自动无人驾驶模式下,运控子系统通过网络信号或模拟量信号输出一定的牵引力或制动
力,发送至车辆牵引制动单元,控制列车进行加速及减速,并通过对比车载 ATP 子系统采集的列车
智能交通产品与技术应用汇编
392
速度信息,实时调整输出牵引力或制动力的大小,使列车在车载 ATP 子系统生成的运行速度曲线范
围内平稳运行。
运控子系统实时速度调整原理如图 4 所示:
观察列车成功启动
紧急制动已缓解
牵引使能已给出
施加紧急制动
紧急制动已施加
牵引已切除
强制安全零速
紧急制动已缓解
牵引已切除
允许跳跃
紧急制动已缓解
牵引使能已给出
允许移动
紧急制动已缓解
牵引使能已给出
速传检测到
列车移动
速传没有检测
到列车移动
启动失败
启动条件
安全零速并重启
列车对齐
站台
列车没有精确
对准站台
图 4 列车牵引制动闭环控制流程
在信号防护的有人驾驶模式下(ATP、RM 模式),运控子系统采集司机控制器状态,将其
位置信息转换为相对应的牵引制动级位信息,并发送至牵引制动单元,人工控制列车加速减速;
当运控子系统故障后,列车进入纯人工驾驶模式,旁路运控子系统对牵引制动的控制,由
司机操纵司控器,激活列车紧急牵引列车线,对列车施加固定级位(50%、100%)的牵引制动力,
从而通过硬线接口控制列车运行。
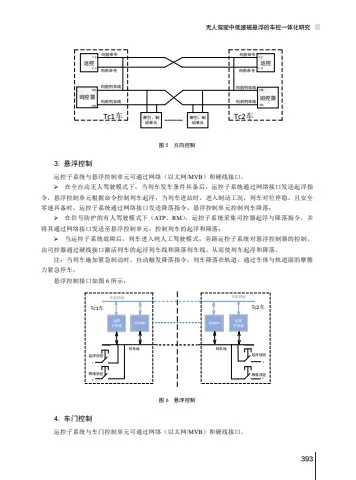
2. 方向控制
运控子系统与车辆牵引单元通过硬线列车线接口。
在全自动无人驾驶模式下,运控子系统发送方向向前、方向向后指令,用于控制牵引系统的
相位方向。列车方向向前、方向向后指令应为互锁关系,即运控子系统不能同时发出方向向前、方
向向后指令。
注:列车运行方向的切换只有在列车处于零速状态下才能进行。
在人工驾驶模式下(ATP、RM 或纯人工模式),列车方向列车线由司机控制器激活,根据司
机当前所处于的驾驶室端,确定列车向前、向后运行控制逻辑。
方向控制接口如图 5 所示:
无人驾驶中低速磁悬浮的车控一体化研究
393
司控器
运控
司控器
运控
向前列车线
向后列车线
向前命令
向后命令
C_F
C_R
C_F
C_R
F位
R位
F位
R位
向前列车线
向后列车线
向前命令
向后命令
牵引、制
动单元
牵引、制
动单元
Tc1车 Tc2车
图 5 方向控制
3. 悬浮控制
运控子系统与悬浮控制单元可通过网络(以太网/MVB)和硬线接口。
在全自动无人驾驶模式下,当列车发车条件具备后,运控子系统通过网络接口发送起浮指
令,悬浮控制单元根据命令控制列车起浮;当列车进站时,进入制动工况,列车对位停稳,且安全
零速具备时,运控子系统通过网络接口发送降落指令,悬浮控制单元控制列车降落;
在信号防护的有人驾驶模式下(ATP、RM),运控子系统采集司控器起浮与降落指令,并
将其通过网络接口发送至悬浮控制单元,控制列车的起浮和降落;
当运控子系统故障后,列车进入纯人工驾驶模式,旁路运控子系统对悬浮控制器的控制,
由司控器通过硬线接口激活列车的起浮列车线和降落列车线,从而使列车起浮和降落。
注:当列车施加紧急制动时,自动触发降落指令,列车降落在轨道,通过车体与轨道面的摩擦
力紧急停车。
悬浮控制接口如图 6 所示:
运控
子系统 悬浮控制 运控
子系统 悬浮控制
列车线
车载网络 车载网络
列车线
起浮按钮
降落按钮
起浮按钮
降落按钮
+
+
+
+
Tc1车 Tc2车
图 6 悬浮控制
4. 车门控制
运控子系统与车门控制单元可通过网络(以太网/MVB)和硬线接口。
智能交通产品与技术应用汇编
394
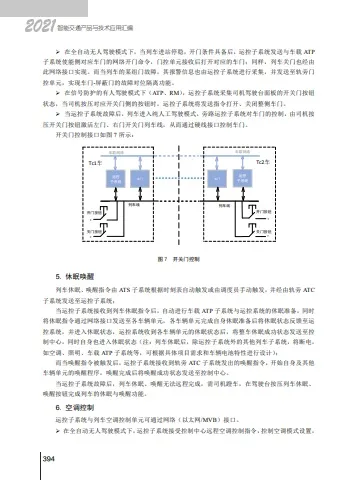
在全自动无人驾驶模式下,当列车进站停稳,开门条件具备后,运控子系统发送与车载 ATP
子系统使能侧对应车门的网络开门命令,门控单元接收后打开对应的车门;同样,列车关门也经由
此网络接口实现。而当列车的某组门故障,其报警信息也由运控子系统进行采集,并发送至轨旁门
控单元,实现车门-屏蔽门的故障对位隔离功能。
在信号防护的有人驾驶模式下(ATP、RM),运控子系统采集司机驾驶台面板的开关门按钮
状态,当司机按压对应开关门侧的按钮时,运控子系统将发送指令打开、关闭整侧车门。
当运控子系统故障后,列车进入纯人工驾驶模式,旁路运控子系统对车门的控制,由司机按
压开关门按钮激活左门、右门开关门列车线,从而通过硬线接口控制车门。
开关门控制接口如图 7 所示:
运控
子系统 车门 运控
子系统 车门
列车线
车载网络 车载网络
列车线
开门按钮
关门按钮
开门按钮
关门按钮
+
+
+
+
Tc1车 Tc2车
图 7 开关门控制
5. 休眠唤醒
列车休眠、唤醒指令由 ATS 子系统根据时刻表自动触发或由调度员手动触发,并经由轨旁 ATC
子系统发送至运控子系统;
当运控子系统接收到列车休眠指令后,自动进行车载 ATP 子系统与运控系统的休眠准备,同时
将休眠指令通过网络接口发送至各车辆单元,各车辆单元完成自身休眠准备后将休眠状态反馈至运
控系统,并进入休眠状态,运控系统收到各车辆单元的休眠状态后,将整车休眠成功状态发送至控
制中心,同时自身也进入休眠状态(注:列车休眠后,除运控子系统外的其他列车子系统,将断电,
如空调、照明、车载 ATP 子系统等,可根据具体项目需求和车辆电池特性进行设计);
而当唤醒指令被触发后,运控子系统接收到轨旁 ATC 子系统发出的唤醒指令,开始自身及其他
车辆单元的唤醒程序,唤醒完成后将唤醒成功状态发送至控制中心。
当运控子系统故障后,列车休眠、唤醒无法远程完成,需司机蹬车,在驾驶台按压列车休眠、
唤醒按钮完成列车的休眠与唤醒功能。
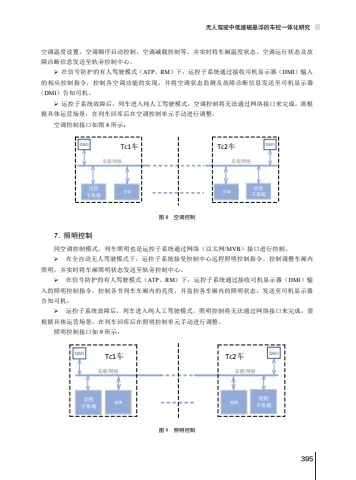
6. 空调控制
运控子系统与列车空调控制单元可通过网络(以太网/MVB)接口。
在全自动无人驾驶模式下,运控子系统接受控制中心远程空调控制指令,控制空调模式设置,
无人驾驶中低速磁悬浮的车控一体化研究
395
空调温度设置,空调顺序启动控制,空调减载控制等,并实时将车厢温度状态、空调运行状态及故
障诊断信息发送至轨旁控制中心。
在信号防护的有人驾驶模式(ATP、RM)下,运控子系统通过接收司机显示器(DMI)输入
的相应控制指令,控制各空调功能的实现,并将空调状态监测及故障诊断信息发送至司机显示器
(DMI)告知司机。
运控子系统故障后,列车进入纯人工驾驶模式,空调控制将无法通过网络接口来完成,需根
据具体运营场景,在列车回库后在空调控制单元手动进行调整。
空调控制接口如图 8 所示:
运控
子系统 空调 运控
子系统 空调
车载网络 车载网络
DMI DMI Tc1车 Tc2车
图 8 空调控制
7. 照明控制
同空调控制模式,列车照明也是运控子系统通过网络(以太网/MVB)接口进行控制。
在全自动无人驾驶模式下,运控子系统接受控制中心远程照明控制指令,控制调整车厢内
照明,并实时将车厢照明状态发送至轨旁控制中心。
在信号防护的有人驾驶模式(ATP、RM)下,运控子系统通过接收司机显示器(DMI)输
入的照明控制指令,控制各节列车车厢内的亮度,并监控各车厢内的照明状态,发送至司机显示器
告知司机。
运控子系统故障后,列车进入纯人工驾驶模式,照明控制将无法通过网络接口来完成,需
根据具体运营场景,在列车回库后在照明控制单元手动进行调整。
照明控制接口如 9 所示:
运控
子系统 照明 运控
子系统 照明
车载网络 车载网络
DMI DMI Tc1车 Tc2车
图 9 照明控制
智能交通产品与技术应用汇编
396
8. 广播控制
运控子系统可通过网络(以太网/MVB)接口与车载 PIS/PA 进行通信;在列车正常运行过程中,
运控子系统根据列车实际运行状态,发送相应的触发指令至车载 PIS/PA,触发列车到站信息、发车
信息、下一站信息等的显示与播报,并采集车载 PIS/PA 的状态及故障诊断信息。
运控子系统故障后,列车进入纯人工驾驶模式,PIS/PA 信息将无法自动触发,需由司机使用紧
急广播播报相应的信息。
9. 辅助控制
运控子系统具有辅助控制功能,与辅助系统 ACU 可通过网络(以太网/MVB)接口,向 ACU
传输控制指令,同时采集 ACU 的状态信息及故障诊断信息,并将状态信息及故障诊断信息发送至
轨旁控制中心或司机显示屏显示。
10. 弓网监测
运控子系统可通过网络或硬线与弓网监测系统接口,实现受电弓状态监视、线网电压监视及弓
网故障诊断等功能。
11. 车辆报警
运控子系统采集车辆各子系统状态,当任一车辆子系统发生故障时,按照不同故障等级,将故
障报警状态通过信号 CBTC 系统发送至控制中心,并根据控制中心指令,手动或自动触发相应的故
障响应机制。
四、结束语
综合上文中描述,将无人驾驶中低速磁悬浮车载 ATO 子系统与车辆 TCMS 系统融合,形成整
体的运控子系统,提高了中低速磁悬浮列车控制系统的智能化水平;在保证车载 ATP 安全防护功能
的基础上,精简车载非安全架构,从而减少车载非安全控制设备及接口,通过高度集成化硬件节省
设备占用空间;优化非安全控制信息流,提高非安全控制功能的实现效率,在降低接口设计难度的
前提下,也将能进一步提高业主的维护效率。
进一步面向未来,随着国内无人驾驶轨道交通项目大量实施,此方案也适用于其他制式的轨道
交通系统,如地铁、跨坐式单轨及 APM 捷运系统等,列车控制系统高度融合形成运控子系统,将
促进轨道交通各子系统间协调发展,共同提高城市轨道交通系统的智能化、集成化水平,大幅度提
高载运的社会经济效益。
基于云平台的轨道交通运营服务系统成套技术研究与应用
397
基于云平台的轨道交通运营服务系统成套
技术研究与应用
林 湛 汪晓臣 杜呈欣 王志飞
中国铁道科学研究院集团有限公司电子计算技术研究所
一、系统概述
随着轨道交通的快速发展,车站级、线路级、线网级的乘客信息服务与运营保障产品无法满足轨
道交通以乘客为本的自动化、智能化和人性化发展趋势。各系统功能单一、相对分散独立、平台种类
多,存在无法协同联动、信息资源共享程度低,新技术、新设备应用不足等问题。具体问题如下:
(1)自动化程度低。信息交互复杂度高,难以实现各车站业务联动指挥和乘客全行程的信息服
务,在信息集中管理、运营协调监管、设备状态监测展示、运营辅助决策等功能的运营协调水平和
信息同步能力不足。不得不人员涉入和干预,有大量机械重复性工作,降低了指挥调度的可靠性、
响应性和效率性。
(2)互联互通性差。各系统独立建设和运营、信息资源共享程度低,难以实现协同联动,网络
运营组织灵活性差,整体运营效率低。
(3)各系统分散。中心系统涉及接口专业众多,但是这些子系统间自成体系、各自为政,无法
实现系统间信息的交互、融合,信息孤岛严重,基础设施分散,网络资源浪费,安全管控偏弱,运
维体系失衡。
针对上述问题,创新性开发的轨道交通信息服务与运营保障系统具有车站级安全防护、监控和
信息服务,线路级信息传输、引导和发布,线网级运营实时监控和调度指挥等特点,广泛应用于轨
道交通客运服务行业,提升了运营效率、服务质量和管理水平。
二、总体思路及技术方案
(一)总体思路
围绕目前轨道交通存在的问题项目组开展创新性工作,开发了“站台级-线路级-线网级”成套
智能交通产品与技术应用汇编
398
信息服务与运营保障关键共性技术,并研制了相关系统和设备,有效的提高了我国轨道交通信息服务
和运营管理水平,并形成一系列创新点,发明研制了相应装备,制定行业标准 1 项、企业标准 3 项。
(1)提出了基于目标图像识别和数字媒体的站台安全防护与监控技术
项目突破自动化程度低,安全防护、运营辅助决策、运营协调水平和信息同步能力低的技术问
题,基于图像识别和数字媒体技术研制了站台安全防护和监控系统,以及乘客引导的媒体播报系统,
提高了系统的自动化和安全防护水平,解决了系统信息不同步、不及时、人员涉入和干预,及大量
机械系重复性工作的问题,提高了系统的可靠性和可用性。
(2)提出了基于 Docker 容器和面向服务的多媒体信息定制化服务技术
针对各系统间互联互通性差、网络运营组织灵活性差、网络整体效率低的问题,基于 Docker
容器和面向服务的多媒体信息定制化技术,研制多媒体资源的统一编辑、分组、播放系统,实现乘
客导引信息的快速传达和定制化传播技术,各项业务功能数据的访问以面向“需求型”引导的方式
发布,解决了系统间无法协同联动、信息资源共享程度低的问题。
(3)提出了基于“三维车站模型、设备状态实时监视、线网客流与行车调度”的三位一体可视
化监控技术
为提升线网运营的综合监管能力、服务水平、效益和安全保障能力,利用可视化监控技术,采
用微服务架构模式,研制线网运营监控指挥管理平台,实现了以线网运营多维感知、智能维修、可
视决策以及实时指挥为核心的网络化运营管理体系,解决了多运营主体、多线路衔接的调度指挥和
应急协同的技术问题。
(二)系统技术方案
1. 基于数字媒体和目标图像识别的站台安全防护与监控技术
站台级乘客信息引导及安全防护系统目前存在以下几个问题:一是不能对乘客进行有效、快速
的引导,导致乘客易聚集,发生紧急情况更会导致生命财产安全;二是系统安全性不足和维护困难,
特别是处于全自动运行场景时,乘客上下车过程存在跌落站台或被列车卷入的风险。迫切需要对站
台级数字媒体及安全防护系统进行智能化升级和改造。针对上述问题,提出的技术方案如下。
1)基于数字媒体技术的多媒体动态合成显示技术
基于数字媒体技术路线,通过对多媒体的表现形式、逻辑关系进行分析并数字化,通过数字化
方式,从“站台级出发,实现多类型多媒体资源的统一编辑、分组、播放,业务功能数据的访问为
面向“需求型”引导的方式。系统采用基于面向对象的架构体系,将乘客运营信息服务系统和路网
中心内的各种数据以服务的方式向外公开,实现乘客运营信息各项业务功能的面向服务访问。
2)全自动运营场景下基于智能图像识别的站台安全防护系统
针对全自动无人驾驶场景研究基于智能图像识别的站台安全防护系统,通过智能故障诊断及自
动隔离关键技术,有效引导乘客上下列车,提高列车运行效率和乘客安全。站台安全防护系统根据
运行模式研制了正常、非正常和失电 3 种控制模式,按照优先级由低到高的顺序对应信号系统(SIG)
控制、就地控制(含 PSL、IBP 和 LCB)和手动解锁 3 个控制级别。
3)基于分布式云架构的站台级安全防护监控系统
基于分布式云架构的站台安全防护监控系统,通过在核心节点、区域节点、 接入节点的分布式
基于云平台的轨道交通运营服务系统成套技术研究与应用
399
组云的方式部署,实现业务软件云化部署、存储云化部署,具有高可靠性、高安全性、高并发性、
易维护、易部署的特点。站台级安全防护监控系统的逻辑架构如图 1 所示。
图 1 站台级安全防护监控系统的逻辑架构
2. 基于 Docker 容器和面向服务的多媒体信息定制化服务技术
传统乘客信息系统中,车站设备数量多达上百台,分布距离较远,逐个设备部署、安装、调试
的工作量非常巨大,导致线路乘客引导信息系统无法与需求相匹配、系统间信息共享度低、系统互
联互通性差;软件部署量大、部署效率低。针对上述问题,提出的技术方案如下。
1)基于 Docker 容器的乘客信息系统
在传统乘客信息系统的架构之上,引入 Docker 虚拟化技术。将既有应用软件进行镜像封装,然
后依据 Docker 私有仓库规范,搭建一套应用软件管理系统。该系统接入中心机房的核心交换机,负
责管理乘客信息系统全部的应用镜像,并向各层级设备群提供镜像下载服务。
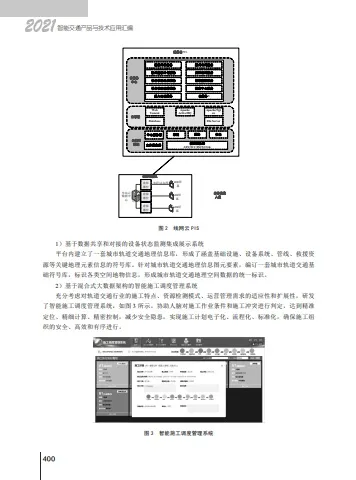
2)基于云架构的多媒体信息定制编排技术
针对传统技术的劣势,提出基于云架构的多媒体信息定制编排技术,将线网内 PIS 数据访问全
部云化,线网云 PIS 如图 2 所示。以微服务组件形式提供服务,数据访问方式均通过云服务调用方
式进行获取,结合业务需求进行处理,最终实现差异化的业务功能。
3)基于 EDF 的运营信息调度算法技术
基于最早截止期优先算法(EDF)的运营信息调度算法技术,通过设置周期轮询服务器程序,
按照先来先服务的方式对任务队列中的任务进行优先级排序,并结合运营消息调度规则,生成相应
时间周期内的执行任务,由播放终端进行执行,满足多类消息智能调度管理和实时高效发布的需求。
3. 基于“三维车站模型、设备状态实时监视、线网客流与行车调度”的三位一体可
视化监控技术
基于大数据平台、云服务的混合式架构,构建了网络化运营监控指挥管理平台。作为“平台”
提供一个全线网运营状态监控、智能运维、智能决策、统计分析、信息发布的新型综合性信息共享
资源库;作为“系统”实现了线网运营效果评估、预警预测、实时动态调度、快速响应联动、运营
策略与资源挖潜的网络化运营业务的功能。
智能交通产品与技术应用汇编
400
中心服务器 存储 网络 安全
褏
播放列表服务
版式播放计划服务
设备状态查看服务
设备监控服务
消息中心服务
版式布局服务
文件访问服务
云服务N
设备状态上报服务
接入认证服务
云基础
设施
Web
Tomcat
Database File Server
Apache/Ngi
nx
云容器
Apache
ActiveMQ
云服务
中心
文件服务器 接口服务器
ATS/TCC/ISCS/CLK
车站云
数据中
心
虚拟 光纤以太网
播控
LCD屏
幕
LCD屏
幕
LCD屏
幕
线路云PIS
云终端接入
虚拟
播控
虚拟
播控
云终端接
入褏
图 2 线网云 PIS
1)基于数据共享和对接的设备状态监测集成展示系统
平台内建立了一套城市轨道交通地理信息库,形成了涵盖基础设施、设备系统、管线、救援资
源等关键地理元素信息的符号库。针对城市轨道交通地理信息图元要素,编订一套城市轨道交通基
础符号库,标识各类空间地物信息,形成城市轨道交通地理空间数据的统一标识。
2)基于混合式大数据架构的智能施工调度管理系统
充分考虑对轨道交通行业的施工特点、资源检测模式、运营管理需求的适应性和扩展性,研发
了智能施工调度管理系统,如图 3 所示。协助人脑对施工作业条件和施工冲突进行判定,达到精准
定位、精细计算、精密控制,减少安全隐患,实现施工计划电子化、流程化、标准化,确保施工组
织的安全、高效和有序进行。
图 3 智能施工调度管理系统
基于云平台的轨道交通运营服务系统成套技术研究与应用
401
3)基于大数据可视化的线网运营策划管理系统
基于大数据平台和数据挖掘技术构建元数据管理体系,以数据为驱动,进行集成、清洗、挖掘
及融合应用,利用动态分层技术,扩大存储处理数据量,实现全网多线路、多运营主体的集中监视、
运营监管和协调以及运营智能决策指挥管理功能,有效地提升了系统的智能化和自动化能力。
三、应用实践案例
轨道交通信息服务与运营保障成套技术与应用项目目前已经全面应用于北京、上海、天津等城
市的站台安全防护、乘客信息服务和运营调度指挥,经过几年的应用推广,取得了显著的社会经济
效益,促进了轨道交通信息服务与运营保障良性发展。
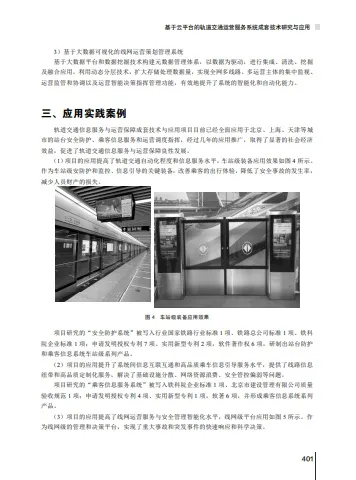
(1)项目的应用提高了轨道交通自动化程度和信息服务水平,车站级装备应用效果如图 4 所示。
作为车站级安防护和监控、信息引导的关键装备,改善乘客的出行体验,降低了安全事故的发生率,
减少人员财产的损失。
图 4 车站级装备应用效果
项目研究的“安全防护系统”被写入行业国家铁路行业标准 1 项、铁路总公司标准 1 项、铁科
院企业标准 1 项;申请发明授权专利 7 项、实用新型专利 2 项,软件著作权 6 项,研制出站台防护
和乘客信息系统车站级系列产品。
(2)项目的应用提升了系统间信息互联互通和高品质乘车信息引导服务水平,提供了线路信息
纽带和高品质定制化服务,解决了基础设施分散、网络资源浪费、安全管控偏弱等问题。
项目研究的“乘客信息服务系统”被写入铁科院企业标准 1 项、北京市建设管理有限公司质量
验收规范 1 项;申请发明授权专利 4 项、实用新型专利 1 项,软著 6 项,并形成乘客信息系统系列
产品。
(3)项目的应用提高了线网运营服务与安全管理智能化水平,线网级平台应用如图 5 所示。作
为线网级的管理和决策平台,实现了重大事故和突发事件的快速响应和科学决策。
智能交通产品与技术应用汇编
402
图 5 线网级平台应用
项目研究成果申请发明授权专利 2 项、软著 21 项,形成线网级调度指挥、设备状态监测、运营
决策和智能运维等系列产品。
四、总结
轨道交通信息服务与运营保障技术具有信息服务、运营实时监控、调度指挥和安全防护等特点,
广泛应用于城市轨道交通、高速铁路、城际铁路和市域铁路,提升了运营效率、服务质量和管理能
力。项目自主化创新性成果将为提高轨道交通安全提供了坚实的理论、方法和工程技术奠定实践应
用的基础。研究成果国产化程度高、工程造价低。
大型交通公共场所密切接触者追踪、识别系统
403
智慧民航
智能交通产品与技术应用汇编
404
大型交通公共场所密切接触者追踪、识别系统
罗 谦 党婉丽
中国民用航空总局第二研究所
一、项目背景
2019 年底武汉爆发新型冠状病毒疫情,铁路、公路、水路和民航运输构建的综合交通体系是人
员流动的主要支撑工具。疫情期间,在人员流动的交通方式中,航班所占的比例达到了 32.8%,其
更是国际运输的主要交通工具。确诊病例密切接触者的有效跟踪及快速隔离措施是疫情防控的重中
之重。现有的流行病学调查以人工询问确诊病例回溯记忆为主来发起密切接触者的跟踪工作。当确
诊病例记忆模糊、主动隐瞒或信息未知时,均可以导致密切接触者难以定位。
对于大型公共区而言,均具有高密度、遮挡严重、人员流动缓慢的特点,机场航站楼场景如
图 1 所示,这些特征一定程度上导致确诊患者。这些特征一定程度上导致确诊患者经过的地方,会
较长时间并在安全距离内接触其余旅客。不是确诊患者的同行或者家属一类的接触者与确诊病例互
不相识且是随机集散产生接触,导致部分接触者的跟踪溯源缺失。因此,我们需要提高密切接触者
跟踪的可行性。
图 1 机场航站楼场景示意图
大型交通公共场所密切接触者追踪、识别系统
405
二、解决方案和系统实现
(一)系统目标
大型交通公共场所密切接触者追踪、识别系统以实现大型公共场所密切接触者识别、溯源为总
体目标。建立基于多目标跟踪模型,确诊人员及密切接触者位置及轨迹跟踪方法;实现基于多数据
融合技术的密切接触者身份信息的确认及输出。
(二)系统总体思路
系统以旅客信息为基础,以视频数据为依据,以基于概率场的跟踪技术为核心,结合传染病机
理,确定潜在感染者位置,结合公共区域所具有的时空特征,实现密切接触者身份的确认。系统实
现总体思路如图 2 所示。
确诊人员信息
安检区域 验票区域 购票区域 . . . 候车区域
定位行人信息 时间轴信息 定位行人信息 时间轴信息 定位行人信息 时间轴信息 定位行人信息 时间轴信息
姓名、身份证、交通工具类型、时间属性
确诊人员关键区域时间及轨迹确认
潜在人员位置及图像身份标定
关键区域中密切接触者人员身份信息
的确认
传染病传播学机理
视频跟踪技术
图 2 系统实现总体思路
以航站楼为例,具体实现思路描述如下:
步骤 1:获得确诊病例的个人信息,如姓名、身份证号和航班号;
步骤 2:通过该确诊病例的身份证号获得办理值机、安检和登机业务的时间;
步骤 3:通过时间去查询该区域 CCTV 的视频图像数据,形成结构化信息与非结构化信息的关
联,建立该确诊病例的个人信息与图像信息的关联;
步骤 4:以该确诊病例图像还原跟踪值机、安检、登机区域该确诊病例的行为轨迹点;
步骤 5:以轨迹点为圆心画出半径 1-2 米的同心圆,圈出圆内涉及的密切接触者图像集合;
步骤 6:逐一对密切接触者图像集合中的每一位图像进行行为轨迹跟踪;
步骤 7:输出该隐形密切接触者办理值机、安检和登机业务的轨迹点时间;
步骤 8:利用该时间和资源编号去匹配值机、安检和登机的业务办理时间,获得密切接触者的
个人信息,如姓名、身份证号、手机号码等,完成该密切接触者图像信息与个人信息关联。
智能交通产品与技术应用汇编
406
(三)系统建设原理
通过对密切接触者的跟踪及溯源,基于业务、资源空间、视频数据融合的匹配规则方法,实现
确诊患者初始位置输出及密切接触者身份的确认及输出,解决密切接触者身份难以确认问题,其具
体的原理框架如图 3 所示。
图 3 密切接触者身份确认原理框架图
针对摄像头远近带来的距离变化以及三维距离与二维距离差异大的问题,系统以影视投射模型
为基础,建立三维至二维空间映射数学模型,实现密切接触者位置的确认,具体原理示意图如图 4
所示(注:(xi, yi)代表不同的圆的圆心坐标)。
图 4 三维距离与二维距离变化映射原理图
针对旅客姿势变化频繁,不同的场景遮挡情况不同,行人难以区分的问题,系统构建了基于空
间概率的跟踪模型实现机场航站楼的确诊人员以及密切接触者位置及轨迹跟踪方法,图 5 展示了具
体的实验逻辑及效果示意。
图 5 基于空间概率跟踪模型的实验逻辑及效果示意图
大型交通公共场所密切接触者追踪、识别系统
407
(四)系统功能实现
1. 确诊人员轨迹追踪
通过输入确诊旅客的身份证信息、所乘坐航班的执行日期和航班号,查找密切接触者,图 6 中
的(a),(b),(c),(d)展示了某办理登机业务模拟确诊病例的轨迹示意图,主要对图像进行分块
并对图像中的人员进行检测及编号,对模拟确诊病例所在图像的倒序连续帧进行上述人员检测和编
号,还原其在相关区域的行为轨迹。
(a) (b)
(c) (d)
图 6 确诊人员轨迹追踪示意图
2. 密切接触者圈定
结合流行病传播机理,得到模拟确诊病例在其整个行为轨迹过程中圈定的隐性密切接触者。流
行病传播的重要条件就是与确诊病例发生密切接触,因此定义不同的密切接触距离可呈现不同
的流行病传播结果。图 7 中黄色框展示了模拟确诊患者在红色框位置时的密切接触者,接触距
离设置为 1m。
图 7 密切接触者圈定示意图
3. 确诊旅客及密切接触者信息管理
可以查询已追踪的确诊旅客信息,包括影响的密切接触者的信息,包括姓名、航班、时间、接
触次数等,同时支持数据下载功能。
智能交通产品与技术应用汇编
408
三、典型机场应用案例
系统已经在首都机场、大兴机场实际应用,疫情期间,支持机场、防控中心根据确诊人员对机
场关键区域的密切接触者进行识别及溯源,已成功溯源密切接触者 42 名,其中有 2 名旅客确诊。成
为了防疫工作的“眼睛”。图 8 为首都机场应用系统界面图。
图 8 首都机场系统应用界面图
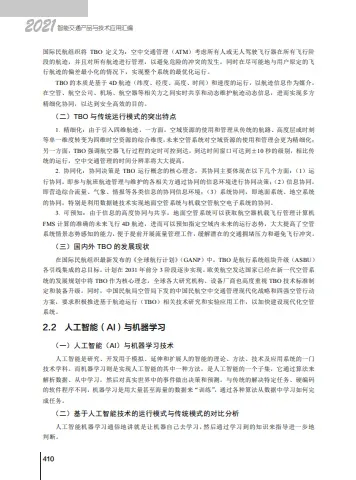
同时,此系统产生的关键技术可直接扩展至关注重点人员识别中,同样可利用航站楼候机区现
有摄像头,以关键节点旅客数据为基础,结合追踪、重识别技术,实现机场关注重点人员轨迹描述
以及出现位置定位,其现在即将在广州白云机场应用于迟登机旅客的寻找,以此来减少迟登机旅客
对航班那延误的影响,并提高机场服务质量,图 9 为广州白云机场迟登机旅客寻找系统界面示意图。
图 9 广州白云机场迟登机旅客寻找系统界面图
四、未来展望
民航机场航站楼作为综合交通体系下典型的大型公共场所,在旅客聚集、排队分布、多业务环
节衔接等方面具有代表性。因此,实现机场航站楼内隐性密切接触者的识别和跟踪,是实现综合交
通体系下隐性密切接触者跟踪的关键,并且具有较强的扩展性和可移植性。基于相同原理,可将上
述在民航交通运输场景中的隐性密切接触者跟踪和识别方法,扩展至客运枢纽、高铁站等地面交通
运输场景之中,进而实现在整个综合交通体系下的隐性密切接触者的跟踪和识别,最终为疫情的常
态化管理提供技术支撑手段。
基于 TBO 的进离场智能决策支持系统介绍
409
基于 TBO 的进离场智能决策支持系统介绍
苏文国 俞彦健 江居旺 中国民用航空厦门空中交通管理站
1、概述
民航运输业是国民经济发展的晴雨表。2021 年,随着我国以“加快构建以国内大循环为主体、
国内国际双循环相互促进的新发展格局”为经济发展战略的确立,中国民航产业在后疫情时代必将
迎来蓬勃发展,带来前所未有的挑战。然而,作为民航空中交通服务供给侧的空管系统,长期以来
在新技术应用方面存在短板,导致了空中交通服务能力与服务需求之间的差距不断增大,运行效率
和飞行安全也承受日益严峻的挑战。同时,在航班量快速增长的过程中,空域利用效率低、机场终
端区排序忙乱无章、管制负荷日益严重等等问题一个又一个愈发暴露凸显,已经成为限制民航发展
的关键因素。
近年来,为了切实解决这类突出难题,航班进离场管理系统(AMAN、DMAN)纷纷在全国主
要终端管制单位投入应用。然而,目前的航班进、离场管理系统(AMAN、DMAN)均以当前航空
器位置点、扇区运行为判断基础,缺乏对航班未来航迹的准确预测,在外界因素(如其他空域用户
活动或复杂天气)的扰动下,很容易出现预判错误的情况,从而导致运行效率和安全水平的大幅度
降低;同时,现有进离场管理系统的航班排序少有引入人工智能技术,决策的智能化程度不高,运
行机制也较为僵化。为解决上述问题,厦门空管站在其“基于 TBO 的进离场智能决策支持系统”研
发中,将“Trajectory Based Operation(TBO)——基于航迹的运行”和人工智能(AI)技术引入并
应用于进离场决策,有效提高了航班进离场管理系统的智能化水平,促进机场、公司、空管多方信
息共享和协同决策,减轻管制员的工作负荷,提升终端区运行效率和安全水平,在短时间内达到低
投入、高效益的目的。
2、TBO 定义、发展现状及人工智能(AI)简介
2.1 TBO
(一)定义
TBO(Trajectory Based Operation)即基于航迹的运行(源自 IACO Doc.9854 号文件的 1.9.2)。
智能交通产品与技术应用汇编
410
国际民航组织将 TBO 定义为:空中交通管理(ATM)考虑所有人或无人驾驶飞行器在所有飞行阶
段的航迹,并且对所有航迹进行管理,以避免危险的冲突的发生,同时在尽可能地与用户原定的飞
行航迹的偏差最小化的情况下,实现整个系统的最优化运行。
TBO 的本质是基于 4D 航迹(纬度、经度、高度、时间)和速度的运行,以航迹信息作为媒介,
在空管、航空公司、机场、航空器等相关方之间实时共享和动态维护航迹动态信息,进而实现多方
精细化协同,以达到安全高效的目的。
(二)TBO 与传统运行模式的突出特点
1. 精细化:由于引入四维航迹,一方面,空域资源的使用和管理从传统的航路、高度层或时刻
等单一维度转变为四维时空资源的综合维度,未来空管系统对空域资源的使用和管理会更为精细化;
另一方面,TBO 强调航空器飞行过程的定时可控到达,到达时间窗口可达到±10 秒的级别,相比传
统的运行,空中交通管理的时间分辨率将大大提高。
2. 协同化:协同决策是 TBO 运行概念的核心理念,其协同主要体现在以下几个方面:(1)运
行协同,即参与航班航迹管理与维护的各相关方通过协同的信息环境进行协同决策;(2)信息协同,
即营造综合流量、气象、情报等各类信息的协同信息环境;(3)系统协同,即地面系统、地空系统
的协同,特别是利用数据链技术实现地面空管系统与机载空管航空电子系统的协同。
3. 可预知:由于信息的高度协同与共享,地面空管系统可以获取航空器机载飞行管理计算机
FMS 计算的准确的未来飞行 4D 航迹,进而可以预知指定空域内未来的运行态势,大大提高了空管
系统情景态势感知的能力,便于提前开展流量管理工作,缓解潜在的交通拥堵压力和避免飞行冲突。
(三)国内外 TBO 的发展现状
在国际民航组织最新发布的《全球航行计划》(GANP)中,TBO 是航行系统组块升级(ASBU)
各引线集成的总目标,计划在 2031 年前分 3 阶段逐步实现。欧美航空发达国家已经在新一代空管系
统的发展规划中将 TBO 作为核心理念,全球各大研究机构、设备厂商也高度重视 TBO 技术标准制
定和装备升级。同时,中国民航局空管局下发的中国民航空中交通管理现代化战略和四强空管行动
方案,要求积极推进基于航迹运行(TBO)相关技术研究和实验应用工作,以加快建设现代化空管
系统。
2.2 人工智能(AI)与机器学习
(一)人工智能(AI)与机器学习技术
人工智能是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门
技术学科。而机器学习则是实现人工智能的其中一种方法,是人工智能的一个子集,它通过算法来
解析数据、从中学习,然后对真实世界中的事件做出决策和预测。与传统的解决特定任务、硬编码
的软件程序不同,机器学习是用大量甚至海量的数据来“训练”,通过各种算法从数据中学习如何完
成任务。
(二)基于人工智能技术的运行模式与传统模式的对比分析
人工智能机器学习通俗地讲就是让机器自己去学习,然后通过学习到的知识来指导进一步地
判断。
基于 TBO 的进离场智能决策支持系统介绍
411
传统模式是"先学后习",通过输入固定的参数和算法得出结果,其本质是一种演绎法,根据已
有的理论公式编程进行逻辑推演和控制。
人工智能模式则是“先习后学"的新模式。我们用海量数据来让计算机进行运算,计算机通过计
算不断归纳分类、学习迭代,再用学习到的方法进行预测。
以“管制员雷达引导排序的调配方法”为例。传统模式会输入“几种管制员常用的引导路径”
作为固定参数来计算结果。而人工智能模式则先分析大量管制员在某一特定位置使用的雷达引导方
法,然后通过“训练数据”用归纳法得出结论,为下一次管制员在这一特定位置需要延误特定时间
时给出“建议的飞行路径和飞行距离”,提供航迹预测和调配建议。
由此可见,如果把一个编程的任务看成是输入→某个函数→输出的过程,那传统模式就是我们
知道这个函数,并手动写这个函数,而人工智能就是从数据中通过统计方法自动找到了这个函数。
3、TBO、AI 技术应用于进离场决策支持系统的设计与实现
根据管制员实际工作中的需求和痛点,在取得多方数据的基础上,建立数学模型,开发升级航
空器进离场排序系统,提供智能决策支持。数据是本系统的基础。系统引接和处理的空管运行数据,
目前包括:
1) 航空器 4D 航迹数据(实时及历史);
2) 航空气象数据(实时及历史);
3) 可用空域数据(实时及历史);
4) 动态电报数据;
5) 飞行计划集中处理数据;
6) 塔台电子进程单数据(实时及历史);
7) GPS 时钟数据;
8) 机场停机位数据(实时及历史);
9) 场监雷达数据(实时及历史);
10)机场、航空公司运行数据;
11)航空器性能数据。
对于进场航空器,排序系统根据航空器实时的位置、高度、速度等航行诸元数据,机场、航空
公司运行数据(含航班时隙协调数据),以及空域限制数据、航空气象数据、流量管理数据等,预测
航空器未来航迹,并推算预计到达机场时间,生成相应合理的管制预案,管制员可以根据需要对排
序进行人工干预。系统在计算管制预案时将相互关联的每个管制扇区联系在一起,统筹管理,使得
整个管制体系的工作效率得以显著提高。对于离场的航空器,根据航空器停放位置、预计离场方式、
使用跑道等数据,以及机场和航空公司运行数据(含航班时隙协调数据)、空域限制数据、航空气象
数据、流量管理数据等,计算航空器从开车、推出、滑行至起飞所需的最早起飞时间,再把该时间
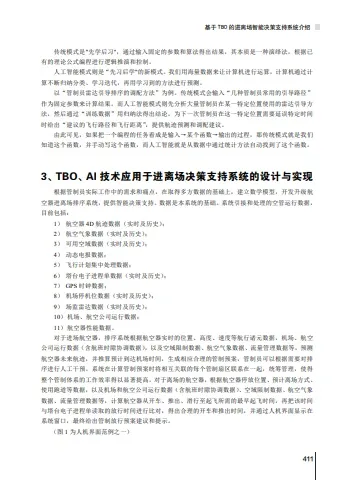
与塔台电子进程单读取的放行时间进行比对,得出合理的开车和推出时间,并通过人机界面显示在
系统窗口,最终给出管制放行预案建议和提示。
(图 1 为人机界面范例之一)
智能交通产品与技术应用汇编
412
图 1
本系统基于航空器 4D 航迹和人工智能机器学习,对航班进、离场排序模型进行系统研发,主
要实现了以下三个方面升级:
3.1 复杂运行环境下的航空器 4D 航迹追踪与预测
航班运行中,航迹既受到航班关联的不同空管服务单位、空域用户和机场运营人的运行影响,
又受到空管不同功能模块如容流平衡、冲突管理、气象条件等的影响。本系统基于上述复杂运行环
境,进行航空器 4D 航迹预测研究。用户可根据其他空域占用情况、雷雨位置,自由在人机操作界
面规划进场航迹,系统可根据新路线实时计算重新排序。
人为干预(如管制员调整速度、雷达引导)航空器后,航空器的速度或航迹势必发生变化,系
统通过对航空器速度和 4D 航迹追踪,用机器语言编码构成一个完整的学习系统,通过不断比对模
仿人类认知过程,实现类似人类决策的能力,进一步对航空器的航迹进行预测分析,在进离场决策
系统中提供进离场排序建议。
1、4D 航迹追踪
(1)确认预定飞行航迹
根据领航计划报(FPL),确认航班的飞行航路;结合机场使用的跑道方向,确认航空器的进场
航迹及进近航迹。预定飞行航迹由飞行航路、进场航迹和进近航迹三部分组成。
(2)航迹追踪方法
1 0 1
1 0
0 1
1 0 2
2 0
0 2
1 0 n
0
0 n
X X 57.3*tan
Y Y
X X Δ 57.3*tan
Y Y
......
X X Δ 57.3*tan
Y Y n
( )
( )
( )
( )
( )
( )
Δ Δ min n MIN 1 2 ,Δ ......Δ
(X0,Y0)航空器当前位置的十字坐标,(Xn,Yn)预定航迹上的各位置点的十字坐标,0 航空
器的飞行航迹。通过比较定位点与当前航迹之间的航迹差,结合航空器当前的飞行高度、飞行速度、
基于 TBO 的进离场智能决策支持系统介绍
413
飞行员的飞行习惯和管制员的调配方法,推测出最有可能飞向的下一个定位点。
2、飞行时间的计算
(1)根据雷达目标地速 VGS 就当前飞行表速 VIAS
cos
57.3 * V VV TAS GS wind
(α 为航空器飞行航向,β 空中风向)
1 *3.28*H
TAS
IAS
V V
(其中 H 为高度,参数为 0.00002)
(2)当前高度及航向的飞行地速
α β cos
57.3
= * VV V GS TAS wind
(在 H 高度上飞行地速,α 为航空器飞行航向,β 空中风向,求出两者之间的夹角)
1
1 1
= 1 1 ( 2 2
n n
avg k k k
k k
V V VV
(在假定航空器保持飞行表速 VIAS 不变,下降率不变的情况下,根据航段需要下降的高度,按
照每 300 米一个高度层求出相应高度层上的地速,从而求出该航段的平均地速)
(3)航段飞行时间
一个单位时间t 内飞行的距离
1 12
2 23
1
1
2
1
2
......
1 2
gs gs
gs gs
n gs n gs n
S VV
S VV
SVV
*Δ 1
1
(Δ Δ )
n
nt k k
k
S SS
(n 个单位时间t 内的总飞行距离)
航段飞行时间
*Δ
T *Δ *
n t
S
n t
S (S 为航段距离)
3.2 通过机器学习实现 AMAN/DMAN 的有效结合,提高单跑道机场运
行效率
不同机型在机场五边的地速变化不尽相同,系统通过机器学习各类机型的速度变化,通过海量
数据结合气象信息计算出航空器飞越跑道入口的距离和时间,为单跑道机场塔台管制员决策是否在
两个落地航空器之间放行离场航空器提供精确依据;同时,当有大量进场航班时,系统会自动优先
考虑落地排序,从而反推出航空器的开车和滑出时间,以节省不必要的开车后油耗。
1、航空器在五边各飞行高度上的平均地速
在特定的时间段t 内,特定的机型在五边不同位置及高度 h(200 米、300 米、400 米、500 米、
600 米、700 米、800 米、900 米)上的平均速度
智能交通产品与技术应用汇编
414
(1)在指定高度 h 上的平均地速
Δt agsh gsh
1
) 1 (
n
n
k
V V
(2)两种机型的在t 时间内、高度 h 的地速差
Δt Δt Δt ΔVV V agsh agsh1 agsh2
(备注: Δt ΔVagsh 为该时段内两种机型的地速差,其中 Δt Vagsh1 为常用机型的地速, Δt Vagsh2 为其他机
型的地速)
(3)求出两种机型在高度 h 的地速差
0 Δt agsh agsh agsh ΔV VV 0.99* 0. Δ Δ 01
(备注: 0 ΔVagsh 为原来计算出的速度差)
(4)各机型在五边的飞行地速(图 2 选取了部分数据)
Δt Δt VV V agsh2 agsh1 agsh Δ
图 2
2、五边各飞行高度上的平均地速与常用机型(B738)的速度差(KM/H)(图 3 选取了部分数
据)。该算法通过应用机器学习的 k-平均算法(K-Means)为解决这种聚类问题提供方案。K-Means
算法把 n 个点划分到 k 个集群(cluster),使得每个点都属于离他最近的均值(即聚类中心,centroid)
对应的集群,重复上述过程一直持续到重心不改变。
图 3
基于 TBO 的进离场智能决策支持系统介绍
415
3、放行策略(落一起一 ADA,落二起一 AAD,落一起二 ADD,AAA 无放行)
策略名称 策略代码 平均落地间隔(秒)
落一起一 ADA 150
落二起一 AAD 120
落一起二 ADD 240
无放行 AAA 100
备注 当落地间隔小于尾流间隔时,系统按照尾流间隔重新计算航空器的落地时间
4、系统根据不同的放行策略,结合进场航空的 ETA 时刻及离场航空器的 CTOT 时刻,自动计
算离场航空器预计起飞时刻、进场航空器的落地时刻及预计延误时间,并将离场航空器信息反馈给
相关单位,从而避免离场航空器开车后长时间等待的问题。
3.3 基于航空器 4D 航迹和 AI 技术的协同运行
本系统目前已经在厦门地区部分民航单位试运行。从实际运行效果上看,系统可为空管、航空
公司、机场等空中交通参与方提供高效的运行辅助决策支持,提高了空中交通参与方的协同能力。
系统结构图 4 所示。
主用服务器
交换机
备用服务器
区域管制室终端(ATS) 航空公司终端(ATS)
交换机
串口通讯服务器
机场指挥中心终端(ATS)
防火墙
管制运行部终端(ATS)
短信MODEM
电子进程
单终端 进近管制室终端(ATS)
电子进程
单终端
数字化管理平台
图 4
运行过程中,空管、航空公司和机场相关部门都以航空器运行航迹为中心,通过航迹规划、航
迹共享、航迹协商和航迹执行等来实现航班运行全生命周期的协同管控。在航空器运行中,航迹数
据的发布、协商过程均通过决策支持系统来实现,确保各空中交通参与方均可准确把握航迹信息和
飞行状态。
运行过程中,系统根据航空器进离场和航路飞行航迹、航空器性能及终端区和机场环境内的已
知限制信息,精确预测航班进离场航迹,并基于预测航迹确定航空器进离场顺序,以及为航空器给
定预计到达/起飞时刻。航空器与地面参与方之间根据航空器进离场的间隔及时刻安排,协同调整相
应的飞行航迹,使得航空器沿最佳航迹做持续上升/下降并执行“量身定制”的进离场方式。若发生
智能交通产品与技术应用汇编
416
不可预测事件(如不利天气、航空器发生特殊情况、冲突管理和解脱需求等等)可能会影响航空器
飞行航迹,无法满足预计时刻,参与方可通过系统进行在线会商,协同制定调整策略;当调整策略
被确定后,参与方将通过航迹、速度调整或放行控制等措施,实现预期管控目标。机场运行协调管
理委员在日常运行中,可以本系统为平台,在空管、航空公司和机场之间搭建共建共享、科学调配
的全面协同发展模式,稳步提升运行效率,推动协同、联动机制不但发展完善。
4、总结
随着民航运输量的持续增长,空管系统作为保障空中飞行安全、维护空中交通秩序的核心机构,
在艰巨挑战面前,迫切需要通过新技术应用,提升空管系统保障能力和运行效率。本决策支持系统
正是在这样的发展背景下,基于 TBO 和 AI 技术,通过数据建模,实现了 AMAN/DMAN 的升级,
并将系统应用于管制员的实际工作中,为进离场航班提供智能决策。
在开发的过程中,我们也深感民航科技还有广阔的发展前景。由于受制于第一代地空数据链通
信 ACARS 系统与生俱来的限制,如速度慢、实时性差,容量小、网络独立,速率被限制等缺陷,
地面空管自动化系统与飞机飞行管理系统之间的信息交互还无法深入全面应用于该系统从而实现信
息实时交互,也成为我们的遗憾。
展望未来,基于全球性网络标准的新一代航空电信网(ATN)将成为地空数据通信和数字化管
制的主要手段,基于合同式自动相关监视(ADS-C)系统将直接向地面提供飞行管理系统(FMS)
的信息,基于 TBO 的空管新理念新技术也将不断研发、验证和应用推广,再搭上 AI 技术的风口,
进离场决策系统将更加智能化、数据化、协同化,从而大大提高空域利用率,更好地服务于空管高
质量发展,服务于民航强国建设。
空管雷达多协议转换设备国产化研发与应用
417
空管雷达多协议转换设备国产化研发与应用
李志远 蔡华华 傅 航 李 进 韩振年 戴 葵 魏宝军
北京空管工程技术有限公司
一、前言
空中交通管理是民用航空运输体系的重要一环,在建设民航强国中承担着重点任务,空管发展
的主要方向就是要围绕建设民航强国目标,积极构建安全高效的空中交通管理体系。北京空管工程
技术有限公司(以下简称工程公司)是华北地区民航空管设备设施重要保障单位,承担华北地区地
空通信、雷达监视、导航等设施设备的维护维修、巡检、大修、紧急抢修及更新改造工作,对华北
地区的空中交通管理起到至关重要的作用。
工程公司近年来对行业影响力比较大且已经在民航多单位推广应用的科研项目“空管雷达多协
议转换设备国产化研发与应用”。项目基于现场可编程逻辑阵列平台技术,并融合了多种其它计算机
技术,解决了“空管雷达协议转换设备国产化”的难题。
二、背景
目前,民航空管主用雷达大多为进口雷达,引进时间自上个世纪八十年代,时间跨度比较大,
早期引进的雷达已经得不到厂家的技术支持,加大了雷达的使用与维护难度。特别是各个雷达系统
的对外接口单元,属于高故障概率设备,又属于非常关键的设备,一旦故障,将雷达数据将无法输
出。后期引进的雷达系统,尽管厂家可以提供技术的支持和后期维护,但费用高,周期长,无法满
足雷达的使用要求。因此,对目前主用的进口空管雷达的关键配件国产化,对保障雷达系统的运行
有非常重要的意义。
三、项目实施
(一)技术路线
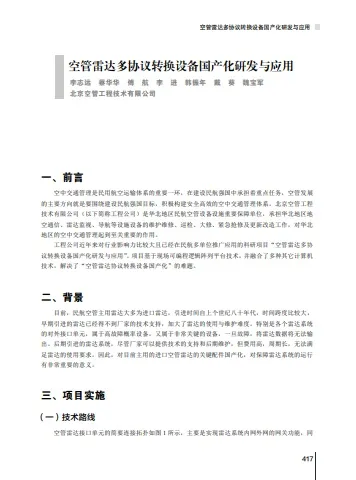
空管雷达接口单元的简要连接拓扑如图 1 所示,主要是实现雷达系统内网外网的网关功能,同
智能交通产品与技术应用汇编
418
时也实现空管自动化系统用户的数据接入功能。
图 1 空管雷达多协议情报服务器与雷达系统简要连接拓扑图
针对雷达系统的对外接口单元,在技术上充分考虑到在保证国产化替代设备的安全性、可靠性
的基础上,在性能上和开发效率的角度综合考虑,采用“数字信号处理器(以下简称 DSP)”加“FPGA”
即 DSP+FPGA 的平台的系统构架(物理实现上是在 FPGA 平台上搭载 DSP 器件),利用嵌入式系
统运行效率高,FPGA 搭建逻辑功能效率高的特点,快速开发国产化的空管雷达多协议转换设备的
兼容系统。
(二)关键平台技术
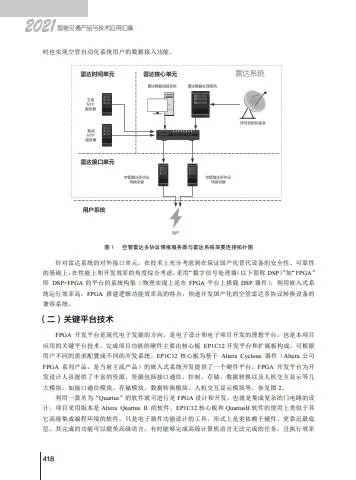
FPGA 开发平台是现代电子发展的方向,是电子设计和电子项目开发的理想平台,也是本项目
应用的关键平台技术。完成项目功能的硬件主要由核心板 EP1C12 开发平台和扩展板构成,可根据
用户不同的需求配置成不同的开发系统。EP1C12 核心板为基于 Altera Cyclone 器件(Altera 公司
FPGA 系列产品,是当前主流产品)的嵌入式系统开发提供了一个硬件平台,FPGA 开发平台为开
发设计人员提供了丰富的资源,资源包括接口通信、控制、存储、数据转换以及人机交互显示等几
大模块,如接口通信模块、存储模块、数据转换模块、人机交互显示模块等,参见图 2。
利用一款名为“Quartus”的软件就可进行是 FPGA 设计和开发,也就是集成复杂的门电路的设
计。项目采用版本是 Altera Quartus II 的软件。EP1C12 核心板和 QuartusII 软件的使用上类似于其
它高级集成编程环境的软件,只是电子器件功能设计的工具,形式上是更依赖于硬件、更靠近最底
层。其完成的功能可以媲美高级语言,有时能够完成高级计算机语言无法完成的任务,且执行效率
空管雷达多协议转换设备国产化研发与应用
419
也要高一些。但应用 FPGA 平台实现特定功能的技术人员在软件工程人员中是少之又少,技术门槛
相对较高。项目成员比较熟练的掌握了这项技术,为顺利开发完成该项目奠定了基础。对于空管雷
达协议转换,在掌握了进口空管雷达的协议后,就可按照协议规则进行设计,并在 FPGA 平台上测
试和修正。
图 2 FPGA 开发板模块分布图
在民航空管系统中,无论是在空管系统升级改造还是在科技研发项目中采用上述技术的事例都
是罕见的。能够把 FPGA 平台技术结合到空管设备国产化中是技术创新的亮点。
图 3 空管雷达多雷达协议转换设备(简称:国产化 PLINE)
智能交通产品与技术应用汇编
420
(三)多种创新技术综合应用
1. 在 DSP+FPGA 嵌入式平台上采用多路数据并行处理方式实现空管雷达数据协议
转换与分发技术
国内空管主用进口雷达的接口设备均采用了 POWER_PC 平台,由于这些设备引进的比较早,CPU
的处理能力有限,存在数据流量过载风险。而项目选用的 DSP+FPGA 平台中的芯片板卡均为低功耗器件,
多路数据并行处理技术的特点。DSP 采用流水线处理模式,负责命令解析与处理,在 FPGA 上建立多路
数据传输的协处理单元,可以并行解析数据帧、组成数据帧、进行链路层以下数据协议转换,包括 CRC
校验值计算均由 FPGA 负责。这种架构的数据处理实时性强,扩展多路数据时,对实时性没有影响。
2. 采用弹性缓存保证串口时钟同步技术
空管雷达数据用于航空管制指挥,对雷达数据的实时性要求很高。为了确保数据的实时性,雷
达数据采用串口同步数据传输模式。同步数据传输
对时钟的要求很高,为了确保数据输入端口与输出
端口的时钟同步,此本设备采用了弹性缓存技术,
此设备提供数据的本地分路功能,当输入端口与输
出端口均由外设提供时钟时,采用弹性缓存,确保
输入数据与输出数据的一致性。
3. 采用双 DSP 双向控制技术
因为实时性是空管雷达数据处理、转换和传输
的重要指标,在设计转换设备硬件平台和软件架构
时,要最大限度的减少数据转换环节的延时,设计
设备时实际采用双 DSP+双 FPGA 模式,两块 DSP
共同担负数据处理工作,由 FPGA 为双方建立同步
用缓存,为了避免缓存过深导致数据转换时延抖动
过大,用环形队列作为缓存的数据存储结构,由
FPGA 产生环形队列读时钟、写时钟、读允许和写
允许信号的双向控制时序逻辑。
四、项目的应用效果
(一)成果通过了中国航空学会第三方评价和成果鉴定
“空管雷达多协议转换设备国产化研发与应用”项目获得了业内权威机构的第三方评价。
2019 年 5 月 16 日,中国航空学会在华北空管局主持召开的“空管雷达多协议转换设备国产化
研究与应用”科技项目成果鉴定会。认定项目独立自主完成了空管雷达多协议转换设备的研制,具
图 4:设备及系统在民航天津空管分局安装调试情景
空管雷达多协议转换设备国产化研发与应用
421
备了全功能替代对应进口设备的能力,性能指标达到且部分超过同类进口产品水平,突破了国外进
口设备在空管雷达数据协议转换的技术壁垒,填补了国内同行业在此方面的空白。建议进一步在民
航空管行业推广应用。
(二)国产化设备顺利在民航空管单位推广
空管雷达多协议转换设备解决进口空管雷达对外数据接口单元故障率高,维修时间长,维修成
本高问题.项目实现了用软件编程的方式在统一的硬件平台上实现目前民航主用空管雷达对外接口
单元的功能替代。
由于民航空管部门中的多个地区空管局都采用了的进口的雷达系统和其配套的空管自动化系
统,因此,项目的研究成果具有普遍性,可以应用到所有采用同样接口的系统中。
目前,空管雷达多协议转换设备已在民航华北空管局天津空管分局、民航中南空管局海南分局
的泰雷兹雷达、民航东北空管局吉林分局的塞雷斯雷达得到
了应用。
(三)项目产生了较好社会效益和经济效益
基于现场可编程逻辑阵列平台技术的空管雷达协议转换
设备研发项目将设备故障响应时间从 3 至 6 个月缩短到 48 小
时内,设备国产化替代后功能相同,最重要的是提高了实效
性、确保了设备正常运行并传输数据,从而保障了空管安全
生产。目前,该类系列产品已在军、民航的空管雷达和自动
化系统中应用,且技术为自主研发,推广意义重大。
国产化设备的研发成功,打破了国外厂商技术垄断,具
有十分重要的现实战略意义。产生了显著的经济效益和社会
效益。后期可在民航空管领域不断推广,对于打破进口设备
限制,节约成本,确保国家安全方面也具有深远意义。项目
研发应用不但节约了大量成本,而且在国外进口的空管雷达
与自动化系统接口的设备故障时,可快速提供相应的国产替代产品,实效性提高了 95%,为空管设
备安全运行提供了有力的技术保障和支撑。
国产化的空管雷达协议转换设备也带来了较好的经济效益。目前,项目研发的雷神(Raytheon)、
塞勒斯(SELEX)、泰雷兹(THALES)3 个品牌进口空管雷达多协议转换设备国产化产品替代品被
军方、民航采用 150 多台,节约成本合计 1200 多万元。
五、结束语
国产化后的空管雷达多协议转换设备性能参数达到并部分超过进口设备,可将设备故障维修响
应时间从 6 个月以上缩短至 48 小时以内,设备的购置成本与维修成本降至进口设备的 1/3,很好地
满足了空管雷达可靠性运行的保障需求,同时也为民航空管雷达传输建立统一的接入标准提供了技
图 5:现场安装后终端显示航班飞行情景
智能交通产品与技术应用汇编
422
术准备和依据。
在解决项目开发效率和空管雷达数据传输的实时性方面取得了多项技术应用成果,特别是采用
了 FPGA 平台技术在硬件底层快速搭建了业务逻辑,高效且低成本解决了快速开发、仿真和测试问
题。FPGA 平台技术的应用大大加快了空管雷达多协议转换设备的国产化进程,同时,为空管业务
系统改造创新的方法和思路拓展了空间,积累了经验。
自 2010 年起空管雷达多协议转换设备在国内民用航空中南地区空中交通管理局海南分局的泰
雷兹雷达、民航东北地区空中交通管理局吉林分局的塞雷斯雷达,以及军航的雷神雷达都得到了应
用,产生了显著的经济效益和社会效益。对于打破进口设备限制,为进口雷达设备的延寿,保护国
家投资有重要的意义。项目不但解决了业务生产中的实际问题,为空管业务保障提供了坚实的基石,
同时也满足了民航产业化格局的需求,在空管设备国产化进程上更进一步,并在设备研发过程中进
行了卓有成效的产学研深度融合的技术创新模式探索。
图 6 空管雷达多协议转换设备国产化研究与应用科技成果
图 7 2020 年获中国智能交通协会科技奖三等奖证书

