






































客 户 论 坛
知识和理性是我们事业腾飞的翅膀 49
“在VR眼镜内部,密集的电子元件就像迷你城市里的高
楼大厦,而有些微型结构件就像是犄角旮旯处的桥梁和基石,
靠人工目视来检根本就看不到”,凌云光AOI团队负责人指
出,“检测它们,必须要更精准的定位和特征提取技术”。
2.眼观六路:2D+3D精密检测让缺陷无处藏身
凌云光AOI团队在可穿戴设备应用领域已有十多年的研
究经验,已成功应用于多个行业领先客户的高精度检测工艺
中,包括耳机、手表、扬声器、Lens、SMT等产品。
项目组在理解整个制程工艺后,针对眼镜机身的复杂组
成探索研究适合每个点位的视觉检测方法,创新性定制了一
套2D和3D视觉精准检测方案,不断调试优化光路设计,力争
实现无检测盲点,确保每个关键点位都能精确检测到。
2D视觉检测,用于处理非立体结构的检测任务。通过
CCD彩色相机获取图片,并通过算法处理,能够快速检测
出缺件或组装不到位的情况,比如判断螺丝和泡绵是否缺
失。对于传统算法难以检测的情况,项目组通过深度学习
技术对缺陷样本进行模型训练,很好地解决了人工难以察
觉的细微问题,如排线是否正确卡在线槽中,提升了产品
的质量。
3D视觉检测,适用于有高度差结构的检测任务。通过对
结构进行360°全方位扫描,不仅能准确测量其高度、体积等
数据,还能实时展示其3D形貌。结合多种检测算法模块可以
完成对复杂表面特征的精准提取和过滤,有效识别螺丝浮锁
和排线扣合等问题,进一步解决了人眼无法判断的难题。
该方案大大提升了对微小缺陷的检测效率和准确性,CT
时间也达成了客户的期望。“有了这套AOI设备后,现在检
测线上只需1个人负责上下料就可以了,每个机台至少节省
了2-3个人力”,团队负责人表示。
3.生产“有数”:随时随地掌握一手信息
在生产线上,数据的统一和可视化让生产管理变得简单
直观。项目组通过整合机台数据和生产系统,实现了数据格
式的标准化,这让信息获取更便捷,复杂的生产统计变得简
单,纷繁的生产线变得有序,让客户无论身在何处都能轻松
监控和管理。
“打开软件,我们就可以查看机台的生产情况。逐一点
开产品图片还能查看产品在质量等方面是否有异常情况” 。
对于高品控要求的产品,细微的变化也需要被密切关注。经
过多年的经验积累,客户已经练就了一双“火眼金睛”,生
产线数据、产品数据等快速扫一眼就能发现问题,整个过程
非常高效。
目前,该AOI设备也扩展到了该公司AR眼镜原型样机及
其手环配件的新品检测。基于项目实践经验,凌云光建立了
一套标准化解决方案,能够显著缩短开发周期,即使在不同
工艺和环境变化下均能保持高检测性能和高稳定性。
技术探路者仰望星辰,质量开发者脚踏实地,VR/AR行
业正稳步走向未来。凌云光以智能检测技术和专业服务的优
势,正在推动万千远见能够落地生根、开花结果。希望能与
更多探路者同行一起推动市场的蓬勃发展,让元宇宙的想象
加速照进现实!
品牌部/供稿
客 户 论 坛
50
“科技创新并非一蹴而就,它往往是在质疑和黑暗中前
行,总有一些‘疯子’愿为改变世界而坚持不懈。”
(诺贝尔奖委员会官网图片)
10月8日,2024年诺贝尔物理学奖揭晓,91岁高龄的
John J. Hopfield与77岁的Geoffrey E. Hinton凭借其在人工神
经网络进行机器学习方面的开创性贡献获此殊荣。他们的研
究不仅重塑了人工智能的进程,也为全球科技产业注入了持
续的创新动力,开启了新一轮的技术革命。
Geoffrey E. Hinton,这位被誉为“深度学习之父”的科
学家,其研究模仿人脑工作原理,彻底颠覆了传统机器学习
方式。早期在微软支持下,他的团队突破语音处理瓶颈,为
AI应用普及奠定基础。2012年,Hinton与其学生开发的
AlexNet在ImageNet竞赛中大放异彩,凭借创新的卷积神经
网络模型,不仅证明了深度学习在计算机视觉领域的巨大潜
力,更宣告了人工智能新时代的到来。此后,全球科技巨头
纷纷参与对其团队的竞购,谷歌最终以4400万美元高价收
购,这一举措不仅引发人才争夺热潮,还助力谷歌在语音识
别、图像处理和自然语言处理等领域取得重要突破。Hinton
推动谷歌AI发展并促成其收购DeepMind,开启现代AI应用新
篇章,他本人也在2018年荣获图灵奖。
致敬!AI 之父荣膺诺奖
文 | 品牌部
客 户 论 坛
知识和理性是我们事业腾飞的翅膀 51
Hinton的科研之路并非一帆风顺。早在1986年提出反向
传播算法时,因硬件条件限制,鲜有人认可,甚至被视为“疯
狂”学者,但他坚信神经网络的潜力,哪怕在“无成果期”也
继续深耕,与团队持续优化算法。这个冷板凳,他一坐就是
30年,终于在2012年,随着硬件性能提升和数据资源丰富,
深度学习迎来黄金时刻,成为AI革命的催化剂,推动了从
AlphaGo到ChatGPT等一系列技术的爆发。他还培养了众多杰
出人才,被誉为AI教父,如Ilya Sutskever、Ian Goodfellow和
吴恩达等,他们在不同领域推动深度学习从理论走向实际应
用,在全球范围内产生了广泛的影响。
与Hinton并列获奖的John J. Hopfield教授,同样对AI发
展作出了不可磨灭的贡献。他在神经网络领域的奠基性工作
(凌云光文化墙图片) (凌云光文化墙图片)
为深度学习理论打下了坚实的基础。 Hopfield 提 出
的“Hopfield网络”模型将生物神经网络的工作原理引入了
计算机科学,为神经网络在记忆建模、模式识别等领域的应
用开辟了新的可能。
Geoffrey E. Hinton和John J. Hopfield的坚韧与创新精
神,激励着全球科技产业的不断突破。自1996年创业以来,
凌云光秉持“为机器植入眼睛和大脑”的理念,在视觉与AI
技术领域深耕28年,凭借光学成像、视觉软件与算法及核心
部件的技术积累,提供可配置视觉系统、智能视觉装备及高
端解决方案。未来,凌云光将进一步深化深度学习算法创
新,助力行业客户实现超级工厂、极限制造和灯塔工厂的战
略愿景。
品牌部 / 供稿
52
技术论坛
TECHNOLOGY
光子引线键合(PWB)与 3D 打印光学微透镜技术
在混合集成外腔激光器中的创新应用
文 | 凌云光子
可调激光器在集成光学中起着关键作用,尤其是混合集
成外腔激光器(ECL),因为它能够有效结合直接带隙III-V材
料增益元件的光学放大与先进的被动光子集成电路(PIC)所
提供的可调光反馈。这种反馈电路可通过硅光子(SiP)平台
或氮化硅(Si3
N4
)波导实现,后者具备比硅光子电路更低的线
性和非线性损耗。这种设计不仅提升了基于谐振腔反馈电路
的内在Q 因 子,还 消除了在 高 功 率条 件下的双 光子 吸收
(TPA),显著降低相位噪声,最终实现小线宽输出。
然而,将III-V增益元件和可调外腔电路在芯片级封装中的
共同集成依然面临挑战。一种集成方法称为“异构集成”,即
将III-V材料层(如InGaAsP)直接转移到已有的硅或氮化硅PIC
电路上,这样可以实现高密度单片集成。但是,这个过程涉及
到的工艺非常复杂,主要应用在硅光子平台上,但技术难度和
成本都很高。
另一种方法是将III-V芯片和被动反馈电路分别加工在不
同衬底上,然后在紧凑的多芯片模块中进行混合集成。这种
方法允许单独优化和测试每个组件,并促进增益元件与温度
敏感反馈电路之间的热解耦。然而,混合光子多芯片模块的
组装极度依赖基础光学芯片的高精密对准。为确保各个芯片
之间的光耦合效率,需要在组装过程中进行“主动对准”,即
不断调整和优化。这种复杂的操作会降低制造速度和效率,
因此难以实现大规模、成本效益高的生产。
1.新型基于Si3N4的混合集成ECL
本文通过实验验证了一种新型的基于Si3N4的混合集成
ECL,采用光子引线键合(PWB)技术,将其用作反射半导体
光放大器(RSOA)和外部反馈电路之间的耦合元件。PWB是
在一个完全自动化的工艺过程中原位(in-situ)制造的,这意
味着它们是在装配过程中直接定制成型。这种定制设计能够
使PWB的形状与两端芯片的模式场大小和位置精确匹配。即
使不同波导的截面尺寸差异很大,或者芯片的放置精度有局
限性,PWB仍然能实现低耦合损耗。该设计减少了对主动对
准的依赖,从而提高了制造效率和可扩展性。
在概念验证实验中,团队展示的ECL具备90nm的调谐范
围(1480nm–1570nm),芯片输出功率超过12dBm,边模抑制
比(SMSR)高达59dB。研究团队实现了979Hz的本征线宽,
这在类似的反馈架构中是非常低的值。在实际应用中,PWB
作为腔内耦合元件的光学损耗约为1.6±0.2dB。
在输出端,Si 3N4反馈电路通过3D打印的附面微透镜
(FaML)与单模光纤阵列相连接,微透镜能够高效地将光信
号耦合至光纤中。3D打印技术的优势在于可以精确定制微透
图 1. 带有 3D 打印腔内光子引线键合(PWB)和附面微透镜(FaML)的
混合集成 ECL 模块的概念示意图
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 53
中间SiO2层的厚度不变。在我们的设备中,顶层Si3N4的厚度
从常规的175nm逐渐减小到接近端面的零厚度,最终仅保留
底层Si3
N4
条带的75nm厚度。
在芯片输入处,Si3N4条带的初始宽度为2μm,并在锥形
部分的末端减小到标准宽度1.1μm。这种设计使得测得的椭
圆模式场尺寸为7.2μm(水平)和4.6μm(垂直)。为了最佳地
与芯片端面的模式场尺寸匹配,PWB的矩形截面设计为宽度
8.0μm和高度5.0μm。
在实施中,PWB填补了RSOA与Si3N4芯片之间306μm的
间隙。RSOA侧的PWB具有初始横截面4.0μm×4.0μm,以匹
配RSOA端面的模式场尺寸。PWB的横截面随后减少到常规
的2.4μm×2.0μm。在Si3
N4芯片的端面,PWB上调至上述的最
终横截面8.0μm×5.0μm,以连接到片上Si3
N4
外腔。PWB在这
两段之间保持常量横截面2.4μm×2.0μm,同时轨迹描绘出一
个弧形,以顺利连接两端的边缘耦合波导(WG),尽管它们
的发射方向差异显著。在RSOA和Si3N4芯片的端面上打印的
附加结构改善了PWB的机械稳定性,如图1(c)所示。
S i 3N 4芯片的输出端依赖于五个相同的附面微透镜
(FaML),这些透镜被打印到光纤阵列(FA)的端面。这些
FaML是专门为外腔芯片的输出端设计,以便与光纤阵列(波
导端口1-5)进行有效耦合。外腔再次依赖一对Si3N4条带,这
些条带从标准宽度1.1μm向端面缩减至最终宽度0.8μm,底部
的Si3N4层保持75nm的恒定厚度,而上层的厚度则从175nm
降至零。
通过这种设计,最终的模式场尺寸在两个方向上均为7.5
μm。FaML的长度为70μm,提供了透镜尖端与Si3
N4
波导端面
之间的工作距离为50μm。因此,FA与Si3
N4
芯片端面之间的距
镜的形状,以满足不同应用的特定需求。为了验证这款ECL的
性能和应用潜力,研究团队将其用作窄线宽可调谐泵浦激光
器,以生成耗散Kerr孤子(DKS)频率梳,展示了在高性能光
学系统中的巨大潜力和广泛的应用前景。
该设备由两个芯片构成,均安装在一个公共铝基座上:
一个是安装在铜散热器上的InP反射型半导体光放大器
(RSOA),另一个是基于Si3
N4的外腔电路,输出端连接到光
纤阵列。设备通过附在铝基座上的PCB进行控制,PCB与基座
紧密相连。
图1(b)InP RSOA和Si3
N4
芯片的俯视图。Si3
N4
芯片包含一
个采用Vernier调谐的椭圆形谐振器R1和R2的Sagnac环镜、
一 个腔相调谐器(CPT),以 及基于MZI的可调输出耦合
器。InP RSOA的后面端面经过高反射(HR)涂层处理,前面
则具有抗反射(AR)涂层,且前面以9.0°的角度切割。PWB用
于填补RSOA前面与Si 3N4芯片上边缘耦合器(EC)之间的
306μm间隙,该边缘耦合器由一条锥形波导(WG)组成,倾
斜角度为19.9°。PWB的应用使得即便芯片两端的发射方向不
匹配,也能实现良好的光耦合,体现了设备在芯片对准和光学
连接上的灵活性。
在该设备中,CPT的长度为1mm,Vernier椭圆形谐振器
的周长分别为885.1μm(R1)和857.4μm(R2)。四个辅助波导
(WG2至WG5)和输出波导(WG1)被布置在Si 3N4芯片边
缘,并与相应的渐变EC连接,间距为127μm。所有五个波导端
口通过3D打印的FaML与单模光纤(SMF)阵列耦合。
图1(c)展示了模块的侧视图。每个PWB的端部配备了额
外的连接结构,以增强机械稳定性。Si 3N4的椭圆形谐振
器、MZI和CPT通过热相位调谐器进行调节,CPT用于调整腔
回路相位,以确保最大镜面反射率对应的波长为2π的整数
倍。基于MZI的可调输出耦合器则用于设置从激光腔中提取
的光与反馈到RSOA的光之间的比例。
2.ECL模块组装与性能表征
在模块组装的第一步中,RSOA通过导电胶粘贴到铜散
热器上,随后与Si3N4芯片粗略对准,并一起固定在铝基座上
(如图1(a)所示)。铝基座上的阶梯结构用于调整RSOA芯片
与Si 3N4外腔芯片波导层的高度。PWB轨迹取决于RSOA和
Si3
N4
外腔芯片端面的具体位置和发射方向,如图1(b)所示。
外腔(EC)依赖于光点尺寸转换器(SSC),其设计通过
减小Si3
N4
顶层的厚度和两个叠层Si3
N4
条带的宽度,同时保持 图 2. ECL 模块的实现和性能表征
54
技术论坛
TECHNOLOGY
用,分析了它们在提升激光器性能、降低制造成本以及简化
组装过程方面的贡献。PWB技术通过高效的光连接实现了
III-V增益元件与被动光子集成电路之间的无缝耦合,消除了
传统组装中对高精度对准的依赖。该技术采用多光子光刻工
艺,能够在制造过程中原位定制形状,适应不同芯片之间的
模式场尺寸和位置差异,从而确保低耦合损耗。
FaML技术利用先进的3D打印技术制造微光学结构,实
现超高的定位精度和优良的光束整形效果,显著减少光损耗
并实现更高的传输效率。该技术能够根据具体应用需求精确
设计微透镜的几何形状和结构,从而优化光耦合效果,并保
证产品质量的一致性。
PWB和FaML技术的结合为满足不断增长的市场需求提
供了强有力的支持,推动光子集成电路的发展,提升光电子
器件的整体竞争力。
如需了解这两项技术及相关产品的详细信息,请联系凌
云光公司400-829-1996。
离为120μm,如图1(b)所示。
PWB和FaML均采用一种负光刻胶材料(VanCoreA,
Vanguard Automation GmbH,德国;折射率n=1.53)通过原
位多光子光刻技术制造。制造完成的PWB和FaML在PGMEA
中显影,随后用异丙醇冲洗并进行吹干。FA上FaML的制作是
在PWB制造之后的一个独立步骤,使用3D打印技术完成,并
由定制的贴装机组装。
图2(a)展示了完全组装的ECL模块的显微镜图像,包括假
色的PWB和相应截面的扫描电子显微镜(SEM)图像,以及
FA上五个FaML的显微镜图像。
(a) 根据图1(a)组装的ECL模块的显微镜图像。插图(i) 展
示了扫描电子显微镜(SEM)图像,该图像通过虚假着色处
理,展示了光子引线键合(PWB)在RSOA和Si3
N4
芯片之间
的连接。通过不同位置的横截面标记,可以观察到PWB在光
传播过程中的形状变化及其对光学耦合的影响。插图(ii)展示
了光纤阵列(FA)上的五个附面微透镜(FaML)的显微镜
图像。它们的间距为127μm,并且正对着Si3
N4
芯片上相应的
波导端口(Ports 1至5)。这种设计确保了光纤和波导之间的
高效耦合,减少了光损耗。
(b) 在1550nm波长下,ECL模块的输出功率(Pout)与注
入电流(I)之间的关系。可以观察到阈值电流为19mA,平均
斜率效率为132mW/A(用虚线直线拟合)。
(c) 展示了在注入电流为100 mA时,ECL的激光光谱叠
加图。激光的调谐范围为1480nm至1570nm,以5nm的步幅
进行调谐。在1525nm附近,最大芯片输出功率达到12dBm。
(d) 展示了FM噪声谱,包含拟合的蓝色虚线。固有(洛伦
兹)线宽为δf=πSo=979Hz,这一数值通过实线拟合得到。
3.PWB和3D打印光学微透镜技术在混合集成ECL
中的关键作用
本研究还详细验证了混合集成ECL的多功能性,该设备
成功用作窄线宽可调谐泵浦激光器,并首次在高品质因数的
Si3
N4微谐振器中实现了单孤子Kerr频率梳的生成(详细内容
请参见《JOURNAL OF LIGHTWAVE TECHNOLOGY》,第41
卷,第11期,2023年6月)。频率可调的混合集成ECL在相干通
信、光学相干断层扫描(OCT)等领域中具有潜在的应用前
景。
本文探讨了PWB和FaML技术在混合集成ECL中的关键作
参考文献:
Maier, Pascal, et al.“Sub-kHz-Linewidth External-Cavity Laser (ECL)
With Si3N4 Resonator Used as a Tunable Pump for a Kerr Frequency
Comb.” *Journal of Lightwave Technology*, vol. 41, no. 11, June 2023,
pp. 3479–3490.关于Vanguard Automation公司
关于Vanguard Automation公司 :Vanguard公司成立于2017年,位于德
国卡尔斯鲁厄,是德国卡尔斯鲁厄理工学院(KIT)孵化企业,公司独创
3D打印光子引线键合(Photonic Wire Bonding, PWB)和微光学组件技术,
专注于光子集成芯片耦合和封装应用。Vanguard的设备和技术广泛应用
在光电子集成芯片封装制造领域,包括电信/数据通信高速光模块、3D传
感、光计算等方向。
作为Vanguard公司在中国的战略合作伙伴,凌云光将全面负责其光子引
线键合(PWB)和3D打印端面微光学技术及封装设备的市场营销与技术
服务工作,助力光通信行业和光子集成芯片封装的技术升级和发展。更
多详情,欢迎浏览凌云光官方网站www.lusterinc.com,或者拨打凌云光
电话400-829-1996。
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 55
未来光子技术革新:全自动光子引线键合 (PWB) 与
表面贴装微透镜 (FaML) 技术应用与前景
文 | 凌云光子
本文介绍了光子技术领域的两项创新成果⸺全自动光
子引线键合(PWB)和表面贴装微透镜(FaML)技术。这些技术
由Vanguard开发,结合3D纳米打印和被动对准技术,显著
提高了光学器件的封装效率和成本效益。通过SYMPHONY自
动化解决方案,Vanguard提供从原型设计到大规模生产的完
整路径,已在数据中心等领域取得成功应用,为高效、高精
度的光子集成开辟了新前景。
1. 光子集成面临的挑战与未来解决方案
随着人工智能(AI)、云计算和5G技术的快速发展,现
代社会对数据处理速度和容量的需求呈指数级增长。制造商
因此不断探索更高效、更紧凑且功能丰富的产品解决方案。
然而,传统电子技术在应对数据激增方面的局限性日益凸
显。光子集成技术凭借其高传输速率、低能耗和高集成密
度,成为未来技术革新与规模化生产的关键推动力。
光子集成电路(PICs)和光学元件的应用极大提升了数
据传输速度、能源效率和设备小型化。但这些技术的封装和
集成难题仍制约其批量化生产。光子器件的封装成本通常占
最终产品价格的60%~80%,成为主要瓶颈。尽管主动对准
技术适用于单通道集成,但在高密度1D和2D光通道阵列上的
批量化生产仍面临巨大的挑战。
光学模块由多种光学特性不同的组件组成,如有源组件
(磷化铟激光器)、无源组件(硅、氮化硅或铌酸锂制成)
以及单模光纤或偏振保持光纤阵列等。这些组件的特性差异
使集成过程面临诸多挑战。因此,工业大规模生产亟需解决
因光学差异带来的问题。为降低耦合损失,必须精确匹配各
器件模式场分布并实现高精度对准。高效、可重复的对准过
程对提升生产效率和良品率至关重要,直接影响成本与产
量。此外,封装后的光学组件需在不同应用环境中保持高稳
定性,对准精度通常需达到亚微米甚至纳米级。这些复杂性
导致光子器件的制造成本远高于传统电子器件,良品率也较
低。因此,未来需要采用全新的解决方法来应对这些挑战。
2. Vanguard创新被动对准与3D纳米打印技术
面对光子集成的挑战,德国Vanguard Automation公司
创新性地引入被动对准、机器视觉和增材制造(3D打印)技
术,简化了光子器件连接方式,为高密度集成光子器件批量
生产和封装开辟了新路径。
Vanguard借鉴半导体行业电信号引线键合(Wire Bonding)
的思路,将这一概念引入光信号领域(见图 1)。采用高精度
直接写入的3D激光光刻工艺,制造出微米级长度的3D自由形
状光波导,即“光子引线(Photonic Wire)”,将光完全束
缚在波导内部,确保低损耗和高容差的传输性能。光子引线
键合(Photonic Wire Bonding)是一种自动化工艺,具有高
度的设计灵活性。此外,Vanguard还运用3D纳米打印技术来
制造光学芯片和光纤上的表面贴装微透镜(Face-attached
Micro Lens, FaML),实现低损耗的光耦合,放宽对准容差,
并支持晶圆级别的光学器件边缘耦合测试。
图 1 半导体集成电路电子引线键合 ( 左 ) 和 Vanguard 光子引线键合 ( 右 )
56
技术论坛
TECHNOLOGY
Vanguard将光子引线键合(PWB)和表面贴装微透镜
(FaML)技术整合,形成可扩展的3D纳米制造解决方案,提供
从原型设计到大规模生产的无缝过渡路径,有效解决光子器
件封装中高成本、高精度要求的痛点。
Vanguard 提供一套完整的全自动化解决方案⸺
Vanguard SYMPHONY,包含两大核心系统:
• Vanguard SONATA 1000:用于光子引线连接和表面贴
装微透镜的制造。
• Vanguard REPRISE 1000:用于光学组件的后处理,实
现全自动封装流程。
Vanguard SYMPHONY 集成了BrightWire3D软件,提供
高度自动化的接口检测,检测精度<50纳米,动态计算最佳
的光子引线连接路径。此外,Vanguard还提供了专门定制的
光刻胶(VanCore 系列),满足工业级的可靠性标准,并支
持标准化的工艺流程和工程服务,帮助客户快速从原型开发
过渡到量产阶段(见图 2)。
减少芯片设计中复杂耦合器的占用面积,为建立通用光学耦合
标准奠定基础。PWB技术已成功应用于Kerr Soliton微型频梳
和亚100Hz线宽激光器的开发【3,4】,并通过了相关领域超低温
实验中测试【5】。此外,Vanguard的表面贴装微光学元件技术显
著提高了高带宽相干驱动调制器(HB-CDM)的效率【2】。其专
用光刻胶系列VanCore针对严格的工业Telcordia可靠性要求量
身定制,可在最严苛的环境条件下保持可靠性【2】(见图3)。
表面贴装微透镜技术已成功用于电光引擎的构建,例如
光收发器、共封装光学 (Co-Packaged Optics)、光引擎和传感
设备【6】。结合Vanguard的技术,显著提升了光在光子器件之
间传输的耦合效率,从而降低了整个系统的功耗【见图3】。
通过晶圆级精准对准和打印表面贴装微透镜,Vanguard
实现了规模化生产能力,并增强了应对新兴应用需求的能力
【6,7,8,9】。其微透镜技术已成功应用于光束整形元件【10】;并在
相关领域中增加了超导纳米线单光子探测器(SNSPD)的有
效收集区域,成功解决了此类设备的设计瓶颈【11】。
图 2:Vanguard Symphony 是 Vanguard Automation 的全自动光子集成和封装解
决方案,包括基于 3D 光刻纳米制造技术的自动化单元 Sonata 1000 和用于预处理
及后处理的自动化单元 Reprise 1000。这些系统配备了 Vanguard 的 BrightWire3D
软件,能够实现高精度检测和实时轨迹计算。此外,Vanguard 提供自研光刻胶(VanCore
系列)、标准工艺开发、产品支持以及工程服务,形成从原型开发到大规模量产的完
整解决方案
图 3:Vanguard Automation 的工业级表面贴装微透镜技术,
兼容多种应用,并已广泛通过行业标准测试
图 4:Vanguard Automation 利用 3D 光刻技术
将光子集成引入生产链的实施路径
3. Vanguard技术的市场应用与成功案例
Vanguard的3D纳米打印技术广泛应用,推动了围绕其
技术的生态系统发展。客户和合作伙伴利用光子引线键合和
表面贴装微透镜技术,解决了混合模块封装和集成中的各种
难题。
在数据中心、电信和人工智能等关键市场,Vanguard的
光子引线键合工艺已被应用于硅、氮化硅、磷化铟和铌酸锂等
多种材料平台【1】,推动了混合集成概念的发展。其独特优势
在于支持一个耦合设计工具包(PDK)连接不同类型的光学组
件,兼容所有学术和商业晶圆厂。同时,Vanguard的解决方
案支持使用简单的逆锥形边缘耦合器(Inverse Tapered Edge
Coupler),无需复杂的模式场转换器(Spot Size Converter),
4. 将3D光刻技术整合进生产链的可扩展路径
Vanguard Automation通过其互补技术组合(包括光子
线键合和表面贴装微透镜技术),为大规模生产客户提供了
一条简化的路径,将其技术融入现有生产链中(见图4)。
第一步:通过与传统技术(如主动对准)相结合的混合
方法,将 Vanguard 技术引入现有生产链,可以提升耦合效率
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 57
和生产良率,同时无需对现有生产工艺链进行重大调整【2】。
第二步:在产品中引入光束扩展微透镜,这有助于缓解
光子集成电路(PICs)和其他光学组件(如InP激光器和光
纤)的定位容差问题。从而优化对准容差,使被动组装成为
可行工艺【9】。
最终步骤:将光子引线键合技术集成到产品设计中,可
全面释放光子集成和封装的颠覆性潜力,实现多芯片混合集成
的元件均的标准化拾取和放置,同时优化定位容差,确保高耦
合效率和高良品率,并且支持快速制造和高封装密度【12】。
5. 高产率、低成本与高效益的光子集成解决方案
光子集成技术为行业带来了显著优势,但现有制造方法
在生产吞吐量和成本之间存在权衡。传统的光子集成方法,
尤其是主动对准技术,虽适用于单通道设备,但在处理复
杂、高密度的阵列时,往往会出现生产瓶颈,导致设备成本
上升并影响良品率。
例如,连接单根光纤相对简单,但当光纤通道数量增加
到八个或更多时,复杂性会显著增加。传统技术在处理这种
复杂性时常表现不佳,导致良品率下降。以高性能系统为
例,假设有八个数据通道,每个通道传输速率为100Gbps,
这些通道连接到激光条等昂贵组件。随着通道数量的增加,
光子集成的密度提高,保持高良品率变得尤为关键。光子组
件(如激光器)成本较高,良品率过低可能导致昂贵组件的
报废,从而增加生产成本。
Vanguard Automation结合被动对准与3D纳米打印技
术,提供了一种突破性解决方案。该技术能够实现多通道设
备的光子集成,生产更复杂的设备,同时提高良品率并降低
成本。与传统制造方法依赖于专用工具不同,3D打印基于软
件定义模型,这消除了传统工具准备过程中的长周期,显著
缩短了复杂自由形状光学组件和波导的生产周期,实现从原
型开发到量产的高效转化。3D纳米打印技术能够提供100%
的可重复使用性,使得系统可以轻松适应不同的产品需求和
生产线,从而减少生产过程中的浪费并加速开发进程。
综上所述,Vanguard的光子集成解决方案,包括行业验
证的设备、通过Telcordia认证的材料以及简化的3D打印光学
组件,并结合被动对准技术,能够帮助行业实现高良品率、低
损耗和高密度光子集成的目标。其光子引线键合技术整合不同
光学集成平台的优势,能在先进的光子多芯片模块中实现高性
能、紧凑性和设计灵活性。Vanguard的技术还通过光芯片和
光纤上的表面贴装微透镜,实现了低损耗耦合、较大的对准公
差,并支持晶圆级光学器件测试。全自动、高度可重复且可靠
的Vanguard SYMPHONY解决方案已被研究机构和行业客户用
于下一代光子集成和封装,助力行业迈向新阶段。
FURTHER READING/REFERENCE
[1]Aeponyx Lightwave Webinar- https://www.aeponyx.com/lightwavewebinar
[2]Y. Mizuno et al., “Low Insertion Loss 128-Gbaud HB-CDM with
3D-Printed Spot Size Converter Integrated InP-based Modulator,” 2023
Optical Fiber Communications Conference and Exhibition (OFC), San
Diego, CA, USA, 2023, pp. 1-3, doi: 10.1364/OFC.2023.Th2A.8
[3]Y. Chen et al., “Self-Injection-Locked Kerr Soliton Microcombs with
Photonic Wire Bonds For Use in Terahertz Communications,” in CLEO
2023, Technical Digest Series (Optica Publishing Group, 2023), paper
STh3J.1. Link to article
[4]Y. Chen et al., “Frequency-Agile Self-Injection-Locked Lasers With
sub-100 Hz Linewidth based on In-Package Photonic Wire Bonds,” in
CLEO 2023, Technical Digest Series (Optica Publishing Group, 2023),
paper STu4P.4. Link to article
[5]B. Lin et al., “Cryogenic Optical Packaging Using Photonic Wire,” July
2023. Link to article
[6]POET Technologies News - March 6, 2023 - https://poet-technologies.
com/news/2023-mar-6.html
[7]Y. Xu et al., “3D-printed facet-attached microlenses for advanced
photonic system assembly,” Light: Advanced Manufacturing, 4, 3(2023).
doi: 10.37188/lam.2023.003
[8]P. Maier et al., “3D-printed facet-attached optical elements for
connecting VCSEL and photodiodes to fiber arrays and multi-core fibers,”
Opt. Express, 30, 46602-46625 (2022). Link to article
[9]OPHELLIA: On-chip Photonics Erbium-doped Laser for Lidar Applications.
More info
[10]S. Singer et al., “3D-printed facet-attached optical elements for
beam shaping in optical phased arrays,” Opt. Express, 30, 46564-46574
(2022). Link to article
[11]Y. Xu et al., “Superconducting nanowire single-photon detector with
3D-printed free-form microlenses,” Opt. Express, 29, 27708-27731 (2021).
Link to article
[12]V. Deenadayalan et al., “Packaged Tunable Single Mode III-V Laser
Hybrid Integrated on a Silicon Photonic Integrated Chip using Photonic
Wire Bonding,” 2024 IEEE ECTC, Denver, CO, USA, 2024, pp. 1387-1391, doi:
10.1109/ECTC51529.2024.00226
关于Vanguard Automation公司 :Vanguard公司成立于2017年,位于德
国卡尔斯鲁厄,是德国卡尔斯鲁厄理工学院(KIT)孵化企业,公司独创3D
打印光子引线键合(Photonic Wire Bonding,PWB)和微光学组件技术,专
注于光子集成芯片耦合和封装应用。Vanguard的设备和技术广泛应用在
光电子集成芯片封装制造领域,包括电信/数据通信高速光模块、3D传
感、光计算等方向。
作为Vanguard公司在中国的战略合作伙伴,凌云光将全面负责其光子引
线键合(PWB)和3D打印端面微光学技术及封装设备的市场营销与技术服务
工作,助力光通信行业和光子集成芯片封装的技术升级和发展。更多详
情,欢迎浏览凌云光官方网站www.lusterinc.com,或者拨打凌云光电话
400-829-1996。
58
技术论坛
TECHNOLOGY
研究团队:清华大学
近年来,空地协同技术得到了快速发展,无人机定位导
航技术与无人车的长续航、重载荷相弥补,现已广泛应用于
在测绘、协作探索等任务场景。由于成本低、重量轻,VIO(
单目视觉惯性组合导航系统)在无人机定位导航中得到了广
泛的应用。然而,虽然VIO可以实现精确和快速的实时姿态估
计,但随时间漂移和位置估计等问题仍然存在。
LiDAR(激光雷达系统)是无人车辆常用的外部传感器,
它可以以点云的形式感知周围环境的三维几何结构,并可以直
接获得高精度、高分辨率的环境信息。因此,在空地协同任务
的相对姿态估计问题中,LiDAR点云提供的绝对环境信息可用
于校正单目视觉-惯性组合导航算法的位置估计误差和轨迹漂
移,二者的相对定位精度比无人机的绝对定位精度更高,然而
这种协同定位方法存在两个挑战:
1)在未知场景中无法对点云进行先验处理(线特征提
取、交叉模态描述符等),这使得单目VIO系统难以解决点
云随运行时间和轨迹长度增加的漂移问题。
2)在实际场景中,无法准确获得无人机和无人地面车
辆之间的精确初始相对姿态,导致定位误差随着时间的推移
而累积。
为了解决这些问题,清华大学研究团队提出了一种基于
视觉与激光雷达点云信息紧密耦合的鲁棒且实时的相对姿态估
计方法(LVCP),该方法无需地图或精确初始姿态等先验信
息,即使在初始姿态估计不准确的情况下,该算法也表现出实
时性、鲁棒性和准确性,可以解决复杂环境中单目VIO的漂移
问题。此外,团队将该算法扩展到多无人机场景,并通过
FZMotion光学运动捕捉系统对所提方法进行了实验验证。
1.方案设计
根据传感器类型和计算过程,研究团队将系统设计为三
个模块,即视觉-惯性组合导航定位模块、LiDAR三维映射和
定位模块以及事件触发采样模块:
鉴于3D传感器生成的大规模点云比图像生成的特征点云
具有更精确的空间几何信息,团队利用激光雷达点云在相机
经历剧烈抖动或IMU信噪比较低时,对视觉惯性里程计
(VIO)的漂移进行校正。为实现这一目标,团队首先提出
了一种新的激光雷达-视觉协同定位框架。
在该框架中,团队基于空间几何信息构建了点面关联,
并创新性地构建了一个点辅助的束调整(BA)问题作为后
端,以同时估计相机和激光雷达的相对姿态并校正VIO漂
移。在此过程中,团队通过基于粒子群优化(PSO)的采样
算法来完成当前相机-激光雷达姿态的粗估计,用于采样的相
机初始姿态基于VIO传播获得,并且使用有效特征面关联数
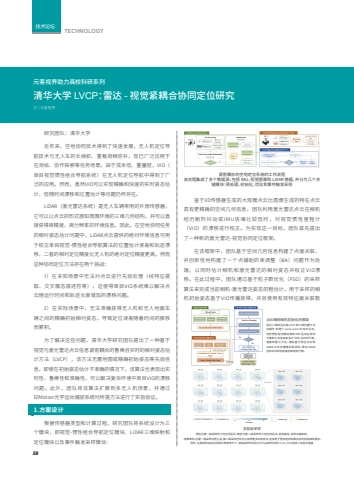
紧密耦合的空地定位系统的工作流程
该流程集成了多个数据源,包括 IMU、视觉图像和 LiDAR 数据,并分为几个关
键模块:预处理、初始化、优化和事件触发采样
元客视界助力高校科研系列
清华大学 LVCP:雷达 - 视觉紧耦合协同定位研究
文 | 元客视界
点云辅助相机初始化的框架
经过二维特征关联、PnP 和三角测量方法
的操作,构建了 up-to-scale 的 SFM 点云。
视觉惯性组合模块使用 IMU 运动生成的
尺度和方向信息来估计 SFM 点云的尺度、
速度和重力方向 ; 随后基于特征点云和
LiDAR 点云的粗略匹配采样,得出 LiDAR
坐标系中的初始姿态和初始尺度。
多层级采样
绿色为第一级采样的几何空间区间,黄色为第二级采样的几何空间区间,蓝色越深,采样点越有效。
结果表明,在第一级采样过程之后,第二级采样空间可以获得更多的有效点,这有助于更快地找到最合适的初始相机姿态。
同时,在相同的初始空间和分辨率条件下,双级采样时间仅为均匀采样时间的 0.1%,大大加快了初始化速度
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 59
(VFPN)来触发PSO采样过程。此外,团队还提出了一种结
合运动结构恢复(SFM)和多级采样的方法来初始化算法,
以解决缺乏初始值的问题。
在验证系统可行性后,研究团队将LVCP系统从单架无人
机扩展到多架无人机,由配备激光雷达的无人地面车辆实时构
建点云图,配备单目相机的无人机依次进入点云图区域。一旦
进入点云地图区域,无人机就开始初始化过程,LVCP系统同
时在LiDAR坐标系中构建地图区域中所有无人机的姿态。
2.验证实验
为了评估LVCP系统框架的实时性、鲁棒性和准确性,研究
团队首先在开源EuRoC MAV数据集和自建数据集上,将LVCP
系统与数据集上的其他方法进行比较,以验证其准确性和鲁
棒性。
A. EuRoc MAV数据集的对比
团队首先在EuRoC MAV数据集上与VINS-mono、 GMMLoc
等四种算法进行了对比测试:
测试方法定性比较、实验结果对比
对比实验结果与地面运行实况
实验场地
为了评估研究方法在实时采样算法PSO在校正VIO漂移方
面的效率,团队设计了一组对比实验,包括贪婪随机采样
(GRS)和自适应窗口均匀采样(AUS):
B. 动态数据集评估
为了在动态点云图和多智能体场景中进一步评估研究方
法。研究团队通过在35×25×12m全域搭载FZMotion运动捕捉系
统的实验场地中同时运行无人车和无人机并收集真实数据。
测试方法的定性比较
结果所示,无论是松耦合还是紧耦合,研究方法都具备显著的优势,因为不需要先验点云图或精确的初始相对姿态,
同时支持动态点云图并保持实时性能,使其在各种具有挑战性的环境中更具适应性和鲁棒性,
特别是对于涉及多架无人机和无人地面车辆的应用
算法评估对比
团队在“V1-03-difficult\"、“V2-03-difficult”和“V2-02-medium”三个序列上评估了上述算法和方法,
并通过计算绝对轨迹误差(ATE)进行了对比,将从精确的初始姿态(扰动为 0m)到不精确的初始姿势(干扰为 0.5m)
将逐渐增加的扰动应用于每种算法的初始姿态估计。结果显示,尽管存在不同的初始干扰,
本研究方法在各种初始姿态干扰下仍保持低轨迹估计误差和校正漂移的有效性
对比实验结果
PSO 的群体智能和信息共享机制能够快速找到最优点,而 GRS 很容易陷入局部最优解。
PSO 和 GRS 收敛速度快,可以快速接近最优解,而 AUS 由于其盲目性,需要大量的采样点来接近最优解
协作 BA 优化多架无人机协同场景
由多架配备视觉传感的无人机构建特征点云,
以地面无人车提供的共享 LiDAR 点云精确定位无人机位置
60
技术论坛
TECHNOLOGY
多智能体轨迹估计
元客视界 FZMotion 光学运动捕捉系统
如图,在图像抖动和模糊严重的情况下,单目VIO算法
可能会出现严重的尺度估计误差和轨迹漂移,通过使用激光
雷达点云提供的绝对空间尺度信息进行校正,可以实时校正
尺度估计中的这些误差和漂移误差的累积,同时,点云的稀
疏不会影响LVCP系统的有效性。
实验表明,LVCP系统在“3台无人机+1台无人车”场景
下仍能在机载实时工作,并保证了其准确性与可行性。
3. 关于「元客视界」
元客视界是凌云光设立的全资子公司,主要面向元宇宙
虚拟现实、Web3.0时代数字人、沉浸媒体、全息通信、计算
光学成像等应用,已形成光场建模、运动捕捉、全景成
像、XR 拍摄等在内的产品布局。
FZMotion智能体位姿追踪系统是元客视界自主开发的运
动捕捉采集与分析系统,可以实时跟踪测量并记录三维空间
内点的轨迹、刚体的运动姿态以及人体动作,空间定位精度
可以达到亚毫米级。
元客视界 FZMotion 光学运动捕捉系统
FZMotion动捕系统在无人机室内定位、仿生机器人运动
规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等
领域得到广泛应用,目前已经与清华大学、中国科学技术大
学、北京航空航天大学、北京理工大学、哈尔滨工业大学等
高校开展合作。凌云光·元客视界致力于为高校提供完备的解
决方案,助力科研发展。
原文链接:
标题:LVCP: LiDAR-Vision Tightly Coupled Collaborative
Real-time Relative Positioning
作者:Zhuozhu Jian, Qixuan Li, Shengtao Zheng, Xueqian Wang,
Xinlei Chen
机构:清华大学、哈工深
原文链接:arxiv.org/abs/2407.10782v1
官方主页:sites.google.com/view/lvcp
图片上部,不同颜色的轨迹代表不同的无人机,每架无
人机都在地面无人车建立的LiDAR地图内定位。大致给出了
每架无人机的初始姿态;图片下半部分为研究方法与VINS和
地面实况进行了比较,白色表示本研究算法的估计轨迹,蓝
色表示VINS估计轨迹。绿色轨迹是地面实况。
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 61
近年来,随着多智能体系统(MAS)的广泛应用,针对
多智能体协同控制问题的研究逐渐增多,分布式协同方式在
这一方面取得了显著成果。然而,在实际应用中,单个智能
体由于自身的特性或特定需求目标,往往无法遵循一致编队
目标;同时由于通信限制,所有智能体不能完全协同合作,
一些未知环境扰动也会影响编队的形成。
从博弈论的角度来看,整个问题可被归结为纳什博弈问
题,在这种情况下,每个智能体都会试图通过预测其他智能体
的行为来优化或调整自己的行为,以达到整体上的纳什均衡。
近年来,基于纳什策略的研究提出了处理未知扰动的编
队控制方法,将未知扰动视为纳什博弈的参与者,扰动抑制
问题被建模为控制输入和扰动之间的非零和博弈问题。而利
用纳什博弈策略对未知扰动和领导者未知输入情况下的二阶
MAS实际编队跟踪问题尚未得到广泛研究。
北京航空航天大学无人系统研究院:
基于分布式博弈策略的实用鲁棒编队跟踪协议设计
元客视界助力高效科研系列
文 | 元客视界
MAS 建模与编队跟踪问题
为了解决以上问题,北京航空航天学院无人系统研究院
研究团队提出了基于分布式博弈策略的多智能体鲁棒编队跟
踪协议,以应对外部扰动和领导者的未知输入;并构建了一
个具有5个移动机器人的实验平台,使用FZMotion光学运动
捕捉系统进行真值验证,以证明所提出的鲁棒编队跟踪协议
的有效性。
1.实用的鲁棒编队协议设计
首先,研究团队构建了具有扰动抑制的博弈策略,设计
了一种实用鲁棒编队跟踪协议,每个无人车无需知道或估计
扰动,根据通信交互来最小化自己的性能指标。
研究人员通过纳什均衡推导出博弈策略,并引入分布式
终端状态观测器,让每个跟随者能够估计自身终端状态,使
编队跟踪控制策略能够分布式实现。此外,团队还分析了最
坏情况下的纳什均衡近似值,使所提出的编队跟踪控制策略
能够在合理的控制参数下保证 ε-纳什均衡。
系统框架图
(7) 编队跟踪博弈策略;(8)终端状态观测器
算法设计如下:
2.实验设计
此前对于纳什博弈策略的验证大多为数值模拟,为了通
过真实实验验证所提方法有效性,研究团队构建了一个具有
5 个轮式移动机器人的多智能体系统验证平台,使用
FZMotion光学运动捕捉系统捕捉移动机器人的实时位置与速
度信息,并作为真值验证。
实验平台
62
技术论坛
TECHNOLOGY
速度、位置的编队跟踪误差
MAS 轨迹:(a)模拟结果(b)实验结果
圆圈为起点,五角星、三角形分别代表领导者和跟随者的轨迹结束点
实验场地设置在北京航空航天大学青云智创实验室,场
地全域覆盖FZMotion高精度光学运动捕捉系统。为了更好地
测试所提方法的有效性和鲁棒性,研究团队在试验开始8s后
为每个移动机器人控制器的的输出信号增加一个额外扰动。
团队分别进行了所提方法的MAS数值模拟和真实实验,
从结果可以看出,通过使用所提方法,四个跟随者移动机器
人最终形成一个四边形编队,并精确稳定地跟踪领导者的状
态轨迹;实际的位置和速度的编队跟踪误差均收敛。
数值模拟和真实实验结果均论证了所提出的分布式博弈
策略的有效性和实用性。在未来的研究中,研究团队将进一
步把分布式博弈策略推广至包含约束条件的高阶多智能体系
统中,旨在解决更为复杂的纳什博弈问题。
3. 关于「元客视界」
元客视界是凌云光设立的全资子公司,主要面向元宇宙
虚拟现实、Web3.0时代数字人、沉浸媒体、全息通信、计算
光学成像等应用,已形成光场建模、运动捕捉、全景成
像、XR 拍摄等在内的产品布局。
FZMotion光学运动捕捉系统是元客视界自主开发的运动
捕捉采集与分析系统,可以实时跟踪测量并记录三维空间内
点的轨迹、刚体的运动姿态以及人体动作,空间定位精度可
以达到亚毫米级。
元客视界 FZMotion 光学运动捕捉系统 元客视界 FZMotion
FZMotion动捕系统在无人机室内定位、仿生机器人运动
规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等
领域得到广泛应用,目前已经与清华大学、中国科学技术大
学、北京航空航天大学、北京理工大学、哈尔滨工业大学等
高校开展合作。凌云光·元客视界致力于为高校提供完备的解
决方案,助力科研发展。
原文链接:
标题:Practical robust formation tracking for multi-agent systems
with a nonautonomous leader: A game-based approach.
作者:Zhexin Shi, Jianglong Yu, Xiwang Dong, Qingdong Li,
Xiaoduo Li,Zhang Ren
机构:北京航空航天大学
原文链接:https://www.sciencedirect.com/science/article/pii/
S0016003224006847
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 63
近日,北京理工大学机电学院的研究团队开展了针对无
人机定位的研究,其最新研究成果已发布于Measurement期
刊(中科院TOP&JCR Q1),论文标题为《IRAL: Robust and
versatile UAV localization using infrared vision and altitude
sensor fusion》,元客视界FZMotion光学运动捕捉系统在实
验过程中提供了帮助。
基于此,北京理工大学机电学院研究团队提出了一种名
为 IRAL 的新颖的外部合作定位方法,通过将红外视觉
(InfraRed vision)同高度传感器(ALtitude sensor)融
合,简单高效地实现了高精度无人机定位。
1.方案设计
首先,研究团队建立了一种基于机载近红外信标、外部
窄带滤波单目RGB视觉传感器和捷联高度传感器的新型外部
协同视觉定位模型。
研究团队提出的IRAL方法以低成本组件简单而有效地解
决了视觉定位的两大关键问题⸺特征点获取和深度估计,
并能够在不同光照环境中实现厘米级精度,实现鲁棒且通用
的无人机定位。
在无人机实际应用中,精确可靠的定位是无人机完成任
务的关键。当前,无人机定位仍依赖于全球卫星导航系统
(GNSS),然而GNSS极易掉线和受干扰,同时很难覆盖室
内和都市峡谷等封闭复杂环境。
近年来,针对无人机定位的GNSS替代和补充方案的研
究逐渐增多。视觉传感器因其体积小、重量低、抗干扰能
力强等优势,逐渐成为研究重点,但视觉传感器无法直接
进行环境特征点采集和深度估计,需要依靠其他手段来完
成定位。
为了实现高效且可靠的特征点获取,研究团队提出的
IRAL方法使用特定波长的近红外(NIR)集成LED作为捷联机
载信标,并采用与信标波长相同的外部窄带滤波视觉传感
器,从而将无人机构建为高信噪比的合作目标以提供稳健的
特征点。
北京理工大学最新 SCI 研究成果发布!
IRAL:无人机外部合作定位
文 | 元客视界
元客视界助力高效科研系列
64
技术论坛
TECHNOLOGY
对于深度估计,研究团队提出的IRAL方法通过高度传感
器测量无人机和单目RGB视觉传感器之间的高度差来实现。
在获得信标的像素坐标和深度后,结合视觉传感器的内参和
外参,即可建立观测方程来求解无人机的空间位置。
由于近红外光独立于可见光谱,窄带滤波确保了信标的
高信噪比,因此,所提出的IRAL方法在定位过程中不受环境
中任何可见光干扰的影响。同时,由于其对光照条件完全不
敏感,其在极端光照条件下(如夜晚或黑暗的室内)仍能正
常工作。
2. 实验验证
为了验证所提方法的性能,研究团队根据环境特征和光
照条件的不同,在包括室内和室外的多个典型真实世界场景
中进行了实验。
为了评估IRAL方法的定位精度,团队在室内实验环境中
布署了亚毫米级精度的FZMotion光学运动捕捉系统作为真值
(ground truth)并同IRAL方法的解算结果进行对比。
室内实验场地均位于元客视界实验室
室内实验设置
研究团队按照环境特征和光照条件设置了四个不同的室
内实验场景,并操纵无人机沿近似圆形轨迹移动。
在每个实验场景下均使用提出的IRAL方法和FZMotion系
统同时测量空间轨迹,并以FZMotion系统的解算结果作为真
值进行了性能评估。
如结果所示,无论环境特征和光照条件如何,所提出的
IRAL方法都能够稳定地实现厘米级定位,同时,无人机的速
度并不会影响IRAL方法的性能。
GSFTM 算法的设计过程和处理结果
同时,团队设计了一种低计算资源需求的基于梯度的连
续帧模板匹配(GSFTM)算法,实现鲁棒的信标识别以获得
特征点的像素坐标。
无人机在实验中的速度变化
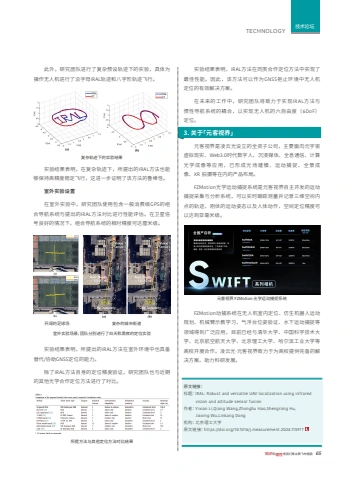
四种场景中的运动轨迹
蓝色为 IRAL 方法的解算结果,红色为 FZMotion 系统提供的轨迹真值
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 65
此外,研究团队进行了复杂预设轨迹下的实验,具体为
操作无人机进行了沿字母IRAL轨迹和八字形轨迹飞行。
实验结果表明,所提出的IRAL方法在室外环境中也具备
替代/协助GNSS定位的能力。
除了IRAL方法自身的定位精度验证,研究团队也与近期
的其他光学合作定位方法进行了对比。
复杂轨迹下的实验结果
实验结果表明,在复杂轨迹下,所提出的IRAL方法也能
够保持高精度稳定飞行,这进一步证明了该方法的鲁棒性。
室外实验设置
在室外实验中,研究团队使用包含一般消费级GPS的组
合导航系统与提出的IRAL方法对比进行性能评估。在卫星信
号良好的情况下,组合导航系统的相对精度可达厘米级。
室外实验场景,团队分别进行了白天和黑夜的定位实验
开阔的足球场 复杂的城市街道
所提方法与其他定位方法对比结果
实验结果表明,IRAL方法在同类合作定位方法中实现了
最佳性能。因此,该方法可以作为GNSS拒止环境中无人机
定位的有效解决方案。
在未来的工作中,研究团队将致力于实现IRAL方法与
惯性导航系统的耦合,以实现无人机的六自由度(6DoF)
定位。
3. 关于「元客视界」
元客视界是凌云光设立的全资子公司,主要面向元宇宙
虚拟现实、Web3.0时代数字人、沉浸媒体、全息通信、计算
光学成像等应用,已形成光场建模、运动捕捉、全景成
像、XR 拍摄等在内的产品布局。
FZMotion光学运动捕捉系统是元客视界自主开发的运动
捕捉采集与分析系统,可以实时跟踪测量并记录三维空间内
点的轨迹、刚体的运动姿态以及人体动作,空间定位精度可
以达到亚毫米级。
元客视界 FZMotion 光学运动捕捉系统
FZMotion动捕系统在无人机室内定位、仿生机器人运动
规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等
领域得到广泛应用,目前已经与清华大学、中国科学技术大
学、北京航空航天大学、北京理工大学、哈尔滨工业大学等
高校开展合作。凌云光·元客视界致力于为高校提供完备的解
决方案,助力科研发展。
原文链接:
标题:IRAL: Robust and versatile UAV localization using infrared
vision and altitude sensor fusion
作者:Yixian Li,Qiang Wang,Zhonghu Hao,Shengrong Hu,
Jiaxing Wu,Linkang Dong
机构:北京理工大学
原文链接:https://doi.org/10.1016/j.measurement.2024.115917
66
技术论坛
TECHNOLOGY
深度强化学习(Deep Reinforcement Learning, DRL)
是人工智能的一个重要领域,它让智能体通过试错的方式来
学习如何完成任务。比如,想让机器人学会走路或玩游
戏,DRL即通过让它不断尝试不同动作,获得奖励反馈,随
后根据这些反馈来调整行为,使得未来能做出更好的决策。
深度强化学习示意图
DRL的优势在于它可以解决复杂任务,特别是那些没有
明确规则或目标难以定义的任务,无需人类手动编程每一个
细节,它可以通过大量的数据和反馈,自动从经验中学习并
改进。目前,DRL已经在游戏、围棋、ChatGPT等领域表现
出了惊人的性能:
DRL的强大性能引发了学者们的广泛思考。例如,将
DRL应用于机器人的局部路径规划中,有望解决传统方法难
以处理的复杂动态环境下的路径规划问题。
虽然DRL有着诸多优势,但其应用仍主要局限于虚拟或
模拟环境。DRL在实际应用中的效率和泛化能力一直是其面
临的主要障碍,具体表现为以下几个方面:
1.上海交通大学 基于DRL的Color方案设计
为了解决以上问题,上海交通大学电子信息与电气工程
学院研究团队提出了一种名为Color的解决方案,如下图所
示。该方案由高性能训练框架ASL和高性能仿真平台Sparrow
组成。
Color 系统架构
文 | 元客视界
一小时生成局部路径规划模型!
上海交通大学基于深度强化学习的 Color 方案设计
首先,研究团队通过ASL的矢量化探索机制提高了训练
样本的质量,Sparrow还配备了多种模拟能力,能够生成高
质量的训练样本。
其次,团队通过加速数据生成、收集和消耗来减少训练
时间,具体来说,Sparrow 的矢量化(并行)模拟显著促进
了数据的快速生成,而ASL的矢量化数据收集模式有效地加
快了数据收集速度,对于数据消耗,ASL的部分解耦设计允
许同时进行数据收集和消耗,防止在环境交互过程中暂停模
型优化。
第三,团队通过将域随机化技术融入Sparrow的矢量化
模拟中,缩小模拟世界与现实世界之间的差距,旨在增强
Sim2Real能力。最后,研究人员通过Sparrow的矢量化多样
性来解决Task2Task问题。此功能可以并行模拟不同的地
图,使训练的智能体接触到各种任务,从而提高其跨不同任
务的泛化能力。
2.实验设计
实验1:ASL训练框架的评估对比
为了验证Color的有效性,研究人员首先在Atari游戏环
样本效率 DRL智能体的训练在样本需求上异常苛刻。这一挑战主要源于所收集的训练数据质量较低,通常只有
少部分样本能显著促进有效学习。
训练时间效率 在复杂环境中,训练一个理想的DRL智能体可能需要数天甚至数周时间。这主要源自DRL训练过
程中样本生成、收集和消耗的速度较慢。
模拟到现实世界的泛化(Sim2Real)为了避免现实环境中不可接受的训练时间,研究人员通常借助可加速的
物理仿真平台,期望在仿真平台中训练的模型能够迁移到真实世界。然而,仿真环境与现实环境通常存在较大
差异,这大大阻碍了迁移的实现。
任务到任务的泛化(Task2Task)DRL智能体容易在训练环境中发生过拟合,导致在面对新的或变化的任务时
性能下降。这一缺陷主要由训练环境的多样性不足所致。
元客视界助力高效科研系列
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 67
境中对ASL框架进行了对比测试,实验结果如下:
如结果所示,在Atari环境中,ASL和已有算法相比,在
样本效率和时间效率上均有明显提升。
实验2:基于DRL的局部路径规划-仿真训练
随后,团队将ASL训练框架与Sparrow仿真平台结合,借
助DDQN深度强化学习算法训练局部路径规智能体。
训练过程
训练过程中,Sparrow仿真平台中的机器人的运动是使
用简化的运动学进行模拟的:
其中控制间隔、控制延迟、速度范围、运动学参数 K等
参数需要在不同仿真副本中进行随机化,而这些值的基准值
则通过FZMotion光学运动捕捉系统进行测定。准确的测定值
对于DRL“仿真到现实”的迁移至关重要。
实验3:基于DRL的局部路径规划-实际应用
仿真训练完成后,得到的模型可以部署到现实世界中
执行导航任务。然而,要使机器人在真实环境中实现导
航,仅仅依靠训练好的模型是不够的,还需要对机器人进
行定位。
研究团队在这里同样使用了FZMotion光学运动捕捉系
统,为移动机器人提供高精度的定位信息,从而使机器人
能够根据自身位置和环境信息,结合模型做出正确的导航
决策。
元客视界 FZMotion 光学运动捕捉系统
FZMotion动捕系统在无人机室内定位、仿生机器人运动
规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等
领域得到广泛应用,目前已经与清华大学、中国科学技术大
学、北京航空航天大学、北京理工大学、哈尔滨工业大学等
高校开展合作。凌云光·元客视界致力于为高校提供完备的解
决方案,助力科研发展。
原文链接:
标题:Train a real-world local path planner in one hour via partially
decoupled reinforcement learning and vectorized diversity
作者:Jinghao Xin, Jinwoo Kim, Zhi Li, Ning Li
原文链接:https://doi.org/10.1016/j.engappai.2024.109726
来源:Engineering Applications of Artificial Intelligence, Elsevier
结合FZMotion动捕系统,Color的有效性与先进性在现
实世界中得到了验证。本研究表明,仅仅通过一小时的仿真
训练,即可生成用于现实世界导航任务的局部路径规划模
型,为DRL在机器人领域的实际应用带来了新的突破。
3. 关于「元客视界」
元客视界是凌云光设立的全资子公司,主要面向元宇宙
虚拟现实、Web3.0时代数字人、沉浸媒体、全息通信、计算
光学成像等应用,已形成光场建模、运动捕捉、全景成
像、XR 拍摄等在内的产品布局。
FZMotion光学运动捕捉系统是元客视界自主开发的运动
捕捉采集与分析系统,可以实时跟踪测量并记录三维空间内
点的轨迹、刚体的运动姿态以及人体动作,空间定位精度可
以达到亚毫米级。
68
技术论坛
TECHNOLOGY
近日,国际人工智能顶尖会议The 39th Annual AAAI
Conference on Artificial Intelligence (AAAI 2025) 论文录用
结果揭晓,由清华大学及凌云光知识理性研究院合作的论文
《通过自感知调优的SAM可调异常分割》(Promptable
Anomaly Segmentation with SAM Through Self-Perception
Tuning)成功入选,论文全文放在本篇后,供大家翻阅学
习,团队创新性地提出自感知调优方法,在少量异常样本下
实现高效精准的异常分割,在锂电、3C电子等行业具有广泛
应用潜力。
AAAI是由国际人工智能促进协会主办的年会,是人工智
能领域中历史最悠久、涵盖内容最广泛的国际顶级学术会议
之一,也是中国计算机学会(CCF)推荐的A类国际学术会
议。AAAI 2025竞争异常激烈,这次会议共收到破纪录的12,957
篇有效投稿,最终仅录用了3,032篇论文,录用率为 23.4%。
本次入选论文聚焦于使用Segment Anything Model(SAM)
进行异常分割。SAM在分割任务中展现了强大的泛化能力,
尤其是在自然图像处理领域取得了显著的进步,但在工业场
景中的应用却面临着一系列挑战,如领域偏移(工业图像与
自然图像差异大,导致现有模型无法准确适应工业场景)、
样本稀缺(异常样本数量有限,训练数据不足)、标注困难
和成本高(工业异常样本难以标注且需要大量专家参与),
导致现有的缺陷检测算法在实际应用中难以提供准确和高效
的解决方案。
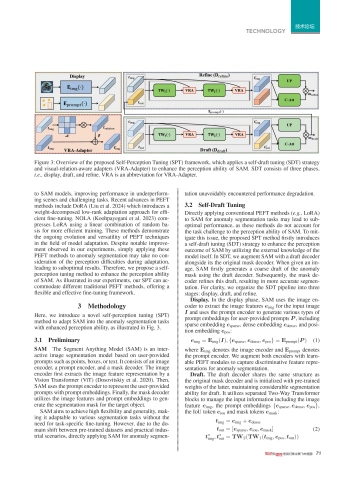
研究团队提出了自感知调优(Self-Perception Tuning,
SPT)方法,通过粗略的初步识别和精细修正相结合的过
程,并增强了模型对异常区域间关系的感知,提高了SAM在
面对领域偏移时的适应性。同时,SPT减少了对大量人工标
注数据的需求,进而降低了成本。实验结果显示,SPT方法
在多个公开工业数据集上表现出色,成功克服了工业场景中
的多重挑战,显著提升了在少样本情况下的异常分割精度。
凌云光深耕“视觉+AI”技术,早在2008年便推出了自
研底层算法平台VisionWARE,性能与全球领先企业对标。
在2022年建立了面向工业领域的通用大模型F.Brain,并广
泛应用于3C、新能源、立体视觉、印刷、新型显示等多个
行业,助力头部客户解决难题。本论文是基于凌云光LVM
视觉大模型在缺陷检测领域的最新探索,在缺陷检测领域
应用并发挥LVM大模型强大的泛化能力,提升工业缺陷分
割的性能。
随着人工智能等技术的飞速发展,产业界与学术界的深
度合作正变得愈发重要。凌云光一直致力于推动科技与产业
的融合,未来将继续深化产学合作,围绕视觉AI、智能制
造、工业互联网等领域深耕细作,将前沿的科研成果转化为
切实可行的解决方案。
品牌部/供稿
自感知调优(SPT)方法框架概述
凌云光与清华大学研究成果入选国际顶会 AAAI
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 69
70
技术论坛
TECHNOLOGY
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 71
72
技术论坛
TECHNOLOGY
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 73
74
技术论坛
TECHNOLOGY
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 75
76
技术论坛
TECHNOLOGY
技术论坛
TECHNOLOGY
知识和理性是我们事业腾飞的翅膀 77
78
图 - 凌云光团队勇夺全球第一,唯一一个在 Catch rate 和 Yield rate 双指标均达 90% 以上的团队
不久前,2024计算机视觉领域的顶级学术会议ECCV
在全球目光注视中顺利落幕,ECCV的全称是European
Conference on Computer Vision(欧洲计算机视觉国际
会议),是两年一度的全球计算机视觉领域与模式识别
领域最顶尖的学术会议。其与CVPR(IEEE/CVF Computer
Vision and Pattern Recognition Conference)
、ICCV(IEEE/CVF International Conference on
Computer Vision)一起并称为计算机视觉领域的三大最
高级别的顶级会议。
本次ECCV首度举办的“单例工业缺陷分割”挑战
赛,吸引了来自17个国家和地区的百余支顶尖团队激烈
角逐。凌云光知识理性研究院深度学习算法团队与清华
大学团队携手参赛,凭借出色的技术实力和创新卓越的
解决方案,脱颖而出,一举夺冠。这是凌云光继2023年
CVPR“工业质检赛”后,连续两年荣获国际赛事冠军。
1.追求卓越,发挥智能,斩获全球第一
参加的竞赛主题为“单例工业缺陷分割”,旨在挑
战模型在仅提供少量示例图像的情况下,准确识别和分
割出工业产品中的特定缺陷类型。竞赛数据集包含五种
产品类型(Campaign、Linda、PCB、Wood、Screw)
和多种缺陷类型,对模型的泛化能力和分割精度提出了
极高要求。
此次竞赛仅仅提供1周时间,要求参赛者提供解决
方案与报告论文,团队面对竞赛难度大幅提升、时间紧
迫、配合较多等挑战,发扬狼性作战精神,咬紧目标,
加班加点,互相配合。凭借团队深厚的AI技术积累和对
工业场景的深刻理解,针对比赛的难点和关键点,最终
提供了一套高效、精准的解决方案即:两阶段分而治之
方案。该方案不仅分割精度高,泛化能力强,而且效率
高,能够满足实际应用场景的需求。
最令团队忘不了的是那些一起通宵达旦打磨方案的
奋斗时光。“回忆此次比赛,让我印象深刻的是比赛的
第一个周日,整个公司就剩下我们三个人,尽管当时结
果还不明朗,大家依然坚持了下来。”团队成员小祎感
慨道。
最终,团队在Catch rate和Yield rate两个关键指标
上均取得优异成绩,以总分第一的成绩夺得全球冠军,
充分证明了我们在工业视觉检测领域的强大实力。
ECCV 视觉 +AI 王牌团队连续两年
斩获国际赛事冠军!
榜样力量:
榜
样 力
量
知识和理性是我们事业腾飞的翅膀 79
图 - 技术方案核心亮点总结
图 - 获奖团队表彰喜报
图 -9 月 30 日凌云光高博士参加米兰现场研讨会,分享技术方案
图 - 米兰研讨会现场
千锤百炼始成钢,既是挑战,也是成长。“虽然过
程中压力很大,但同时也收获成长许多。”团队核心成
员高博士表示:“这次竞赛的难度加大,时间紧迫,非
常考验我们团队的技术能力和互相配合。”他还补充
道:“基于公司常年的技术积累和数据模型,我们团队
抓住关键任务,最后赢得比赛。”
优异的成绩背后,离不开团队的集体努力和认真担
当。获奖团队Leader唐博士表示“研究院(凌云光知识
理性研究院的简称)深度学习团队再一次在ECCV蝉联
VISION 2024的冠军,充分证明了研究院在深度学习核
心算法、平台产品和解决方案的能力,并且这次也是和
清华大学丁贵广教授团队合作共同取得的成绩,是研究
院建立起完善的“学研产”的集中表现,是迈向构建全
球领先的工业人工智能坚实的一步。”
2. 主办方Apple:怎么又是你们赢了?恭喜
在9月30日研讨会上,主办方Apple颁奖时惊讶
道:“又是你们赢了?优秀,恭喜你们!”原来,连续
两次由Apple等主办的国际比赛中夺冠⸺从2023年
CVPR工业质检赛到今年ECCV单例工业缺陷分割赛,都
是首届赛事,凌云光的成就令人瞩目。
事实上,这次获奖之路充满挑战。今年,公司知识
理性研究院深度学习算法团队肩负着F.Brain2.0升级和大
模型开发等三大重任。面对继2023年CVPR夺冠后的高期
望。在人手紧缺、压力增大、竞赛难度剧增的情况下,
团队主力,紧盯目标,团结拼搏,精诚合作,终打胜
仗!
“团队在ECCV赛事夺冠的表现充分肯定了团队在算
法开发和解决方案能力上的卓越实力。通过创新的算法
设计和高效的解决方案,成功应对了复杂的质检挑战,
显著提升了检测的精度和效率。期待团队继续深化技术
应用,推动更多解决方案的落地,为客户创造更大价
值,并在未来项目中持续引领行业发展。”公司知识理
性研究院副院长全煜鸣先生评价道。
80
3.为客户创造更多价值,致力成为视觉人工智能
与光电信息领域全球领导者
知识和理性是我们事业腾飞的翅膀!近期获奖团队
组织了比赛经验复盘与分享会,分享了竞赛中的技术亮
点与宝贵经验,引发了公司内部对技术应用到实际业务
的深入思考和讨论。各BU产品线负责人纷纷表示,为更
好服务客户,要学习获奖团队的创新智慧与成功经验,
将竞赛中取得的技术经验和模型智慧,应用到公司各个
产品线中,打造高品质高价值的明星产品线,推动公司
产品智能化的提升。
公司CTO赵严博士表示:“此次竞赛获得胜利,表
现出公司团队实力的同时,离不开公司二十多年服务客
户的积累。在数据方面,凌云光已经形成了规模庞大的
千万级工业数据集,其中经过精细标注的数据达到50万
条。这些数据涵盖了十几个行业,为我们构建数据模型
和大模型训练提供了坚实的基础。未来,我们计划进一
步扩大数据集,达到百万级规模,为技术发展奠定更为
坚实的基础。此次比赛夺冠,恭喜团队,接下来一起继
续努力将技术转化为产品,为成就客户和行业的梦想不
断奋斗。”
公司总裁姚毅博士对团队取得的成绩表示祝贺和肯
定,并对团队成员展现出的洞察力、深度学习能力和技
术能力给予了高度评价。他强调,团队要继续保持这种
精益求精的精神,深入理解用户需求,聚焦战略客户与
行业需求,并与产品线紧密合作,将研究成果转化为实
际应用,为客户创造更大的价值。
大家的发言激励着团队成员不断追求卓越,我们相
信在所有凌云人的共同努力下,凌云光必将在未来取得
更加辉煌的成就。
企业文化组/供稿
TEAM
员工成长
近期,号召公司中后台干部,召开了《如何通过专业的工作输出,赢得内外的尊敬和信任》的战略思想共识会,会后
要求输出学习心得。收集心得后,经过心得评委会根据《关于心得管理办法》评分规则,在与本职工作相关性、深度思考
与掌握等方面进行公平公正的评分,评选出7个优秀文章,分享给同事们学习。
如何通过专业的工作输出
赢得内外的尊敬和信任
对于客户,我们的价值在于专业的
Vision+AI的能力,给客户提供机器视觉上中下
游的产品和解决方案,并且与客户合作共赢。
1.在上游,我们输出智能器件和视觉软件,
降低客户应用视觉的门坎和成本,提高易用性稳
定性,输出标准化的产品,通过严格的单元测
试、集成测试、系统测试,并且不断迭代降本。
2.在中游,我们提供可配置视觉系统专用视
觉解决方案和视觉应用装备(检测、量测、组
装),智能精密的各类设备和系统,帮助客户降
本减存、提质增效。
3.在下游,依靠数字化、信息化、智能化,
深挖质量数据,提供精益求精的质量管理方案,
利用视觉感知智能、大模型的决策智能,来分析
和优化工艺,进一步提高产品品质,提供工厂大
数据解决方案。
为了做到这些,我们在产品定义、产品设
计、产品开发流程中需要做到:
1.五级架构设计,在设计中做到高可靠性、
稳定性
2.统一的数据模型设计,把工艺数据、生产
数据、质量数据标准化,科学+精准的数据服务
生成系统的可靠分析和智能化应用
3.流畅、易用的界面设计,做的产品易用、
易维护、使用门槛低
4.智能化,应用视觉AI和大模型技术,提高
解决方案竞争力,用人工智能来精准的感知和模
拟物理世界、正确决策并且提高生产良率。
我们通过我们的视觉技术和产品为客户提供
高品质服务,为客户创造价值,受人尊敬和建立
长期稳定共赢关系,在目前的实践中我总结有这
些路径:
Q1 为了对公司战略业务和客户做出贡献,您们如何通过专业的工作输出和协作建立受
人尊敬和信任的业务战略合作伙伴关系?
产品与解决方案部
全煜鸣
知识和理性是我们事业腾飞的翅膀 81
1.按照大客户既有流程和规范,在项目中培
养合格人才,
2.用传帮带的形式把白人带黄,按照70-20-
1 0 的原则,由业内资深人士担任
PM、TPM、LM等角色shadowing下属,由成
熟的黄人PL来带领小白做到日常的coach,与
客户例行开展项目lesson learn和正式培训,统
一认知和做事的习惯
3.项目开展前,需要在内部做好做两件事,
一是文化共建,明确与客户团队文化差异性,互
相理解;二是共建项目团队,明确团队角色和项
目流程,让团队成员了解mode of operation。
1.机器视觉赋能客户,提供高品质产品和解
决方案,成为客户的优选
2.与客户合作共赢,在新兴领域比如AR/
VR、元宇宙、汽车、智能机器人、新能源、智
能自动化领域,共同联合突破,在各类人工智能
中,提供我们视觉智能的软硬件支持,建立联合
实验室或合资公司,在高端制造领域进一步成为
全球领导者
3.承接大客户在新兴领域的技术突破任务,
并找到我们国家在特定技术方向上突破卡脖子的
需求,联合国家实验室、领军科学家和重点研究
团队,进行技术研究和应用推广。
Q2 为了让您的团队有能力当责对结果负责,您们部门如何走专业化的道路实现把小
白变小黄胜任组织工作不被DQ?
Q2 为了让您的团队有能力当责对结果负责,您们部门如何走专业化的道路实现把小
白变小黄胜任组织工作不被DQ?
员 工 成 长
82
我是研发质量管理部的,我主要从以下几个
方面通过专业的工作输出和协作建立受人尊敬和
信任的业务战略合作伙伴关系
(1)我的工作基本就是IPD、CMMI等的流
程建设、落地实施,结合华为IPD实践建立适合
我们业务特点,能解决我们业务痛点的流程、标
准是我们的本职工作。
(2)有效开展质量策划:和PM、PDT经
理、SE、财务代表、市场代表等协同有效开展好
质量策划,明确大家的目标和措施。
(3)识别痛点问题,组织改进:在客诉问
题跟进中,利用QC七手法,分析出共性问题,
组织产品线改进,并计算出PONC值。
Q1 为了对公司战略业务和客户做出贡献,您们如何通过专业的工作输出和协作建立受
人尊敬和信任的业务战略合作伙伴关系?
产品与解决方案部
陈翠华
(1)建立PQA任职资格要求,建立PQA发展
通道。
(2)开展PQA月度绩效管理,推动部门重
点工作进展及客户满意度提升,激发团队活力;
(3)协同产品线开展研发能力提升:研发
设计规范梳理、发布,目前已提交BPQM系统近
100份文件;
(4)今年的IPD2.1标准产品开发流程建设在
智能工业膜材PDT开展建设,工作基本完毕,已
经完成流程培训,正在组织流程、标准考试,并
在其他PDT团队推广落地;
以此把更多的小白变小黄,提升组织能力。
AI应用带来了革命性的技术变革,也为我们带来了全新的发展机会。
Q2 为了让您的团队有能力当责对结果负责,您们部门如何走专业化的道路实现把小
白变小黄胜任组织工作不被DQ?
员 工 成 长
知识和理性是我们事业腾飞的翅膀 83
在专业高度化分工、人才高度流动的今天,
任何一个组织都不缺各类专业人才。在专业技能
上,人与人之间其实也没有什么重大差异。导致
工作结果与价值产生差异的关键,以及是否最终
受人尊敬和信任的关键,在于以下3点:
1、以客户为中心
各种花哨的专业技能与理论体系,但不服务
内外部客户的战略目标,是无法建立受人尊敬和
信任的战略合作伙伴关系。即使是中后台部门,
特别是审计法务这类合规部门,更应该服务业务
战略和帮助组织进步为目标,不是为了找问题而
找问题,这也是我们大觉寺信任计划的内在要
求,一是以审促建,开展业务审计目的是促进内
控完善与优化、减少流程漏洞与风险。二是通过
合规查处,来警示教育好干部,增强底线意识和
敬畏心,最终也是确保大家不走歪路,一条心认
真干事业。三是法律风险的把控,不是阻止业务
发展,而是帮助业务稳健高效地实现战略目标。
所有工作的构建与落地,都是服务于如何帮助内
外部客户业务目标达成,帮助组织提高能力!
2、对结果负责到底
建立真正的工作信任,而非De-commitment,
很关键的是要对结果负责的担当,简单说就
是“说到做到,兑现承诺”,不论遇到多少困
Q1 为了对公司战略业务和客户做出贡献,您们如何通过专业的工作输出和协作建立受
人尊敬和信任的业务战略合作伙伴关系?
审计与法务部
刘旭光
1.深入钻研AI相关知识:持续学习AI计算、
存储、网络基础知识,以及AI领域的最新技术和
发展趋势,探索如何将AI训练和推理优化与光交
换及光电集成芯片设计相结合,理解光通信和光
计算在其中的应用价值,并提升产品性能。
2.结合公司产品优势:对我司光交换和光电
集成芯片方案进行深入梳理,明确产品特点和
市场定位,并结合智算中心架构打造针对性应
用方案。
3.强化跨部门协作:促进团队沟通,加强与
公司内兄弟部门尤其是视觉大模型团队之间的信
息交流,整合资源优势协调利用公司内外部资
源,形成合力,为客户提供全方位支持,超越客
户期望,和大客户建立战略合作伙伴关系。
Q1 为了对公司战略业务和客户做出贡献,建立受人尊敬和信任的业务战略合作伙伴关
系,我将通过以下方式实现专业的工作输出和协作:
战略与MKT部
张华
我将采取以下措施:
1.专业培训学习与清晰分工
组织定期的专业培训,确保团队成员掌握必
要的技能和知识,帮助团队成员理解组织的关键
目标,结合团队每个人的特点,做好明确分工协
作,比如晓蕾负责研究DCI跨域集群相干传输网
络,杨睿博士负责光信息感知方向,于峰博士负
责能量激光应用。
2.职业发展规划
明确发展路径:设计清晰的职业发展路径
(解决方案经理-高级解决方案经理-资深解决
方案经理),让团队成员看到自己在组织中的发
展前景。根据团队成员的个人能力和潜力,制定
个性化的发展计划,提供必要的培训和支持,并
培养适合管理通道的后备干部;建立基于胜任力
的绩效管理体系,定期评估团队成员的表现,并
提供反馈和改进建议。
3.团队协作与沟通
定期组织团队建设活动,增强团队凝聚力和
合作意识。促进团队内部和部门之间的沟通与协
作,确保信息共享和资源整合。明确组织的价值
观和职业道德标准,引导团队成员树立正确的价
值观和职业观。
Q2 为了让您的团队有能力当责对结果负责,您们部门如何走专业化的道路实现把小
白变小黄胜任组织工作不被DQ?
员 工 成 长
84
难与挑战,都要坚忍不拔地坚持到底,直至目标
达成!特别是过程中,自己要多担责,自己多动
脑筋和积极作为,减少对领导或周边资源的不必
要消耗与依赖。这种工作精神下,才会最终有好
的结果,也才会有尊重和信任。
3、认真高调做事,老实低调做人
很认同姚总所讲的⸺“发展的最大秘诀是
没有秘诀,就是认认真真高调做事,老老实实低
调做人”。阳光积极敢打敢拼地高调做事,但又
有格局有胸怀、低调谦虚地做人,一定能被人尊
敬和信任。合规团队(审计与法务)的工作性质很
特殊和敏感,承担了很多不为人知的压力与责
任,如果不扛着压力高调做事,如果平时不低调
谦虚做人,那很多合规工作也将很难开展下去。
这一点特别认同姚总的理念,整个团队也按照理
念在要求自己,开展各项工作。
1、建立科学合理务实高效的工作制度流程
与标准
小白变小黄甚至变大黄的基础是,有一套科
学合理务实高效的工作制度流程与标准,一线或
普通的员工也能在规范的引导或约束下,输出高
品质的工作,并且快速成长。过去几年,从BCG
商业行为准则、反舞弊合规处理举报规定,到知
识产权挖掘布局、风险预警等,结合公司业务与
管理实际,团队一共研究制定和落地执行了近30
项制度流程与标准,工作的规范化、标准化和流
程化,保障了工作的专业且稳定的输出品质。在
一套科学合理高效务实的流程制度下,加上企业
文化理念的影响,小白不断变小黄,铁打的营盘
流水的兵,整个组织充满活力与战斗力。
2、领导要主动担责
团队有能力当责对结果负责,除了需要有能
力模型匹配的人,以及一套工作制度流程与标
准,更为重要的是,需要主管自己深入工作和敢
于担责(handsdirty),特别是做到两个关键:
构建好关键战役,并在作战过程中发挥关键作
用!如果主管不是率先垂范、吃透问题,而是官
僚作风、揽权推责等,那么再优秀的下属,再全
面严谨的制度流程,还是培养不出来专业又担责
的团队,大量成长不起来的小白,就是公司资源
的最大浪费,也是主管的最大责任。这几年在深
度参与一些合规维权、审计项目中,对此深有体
会,把小白变小黄变大黄的团队,一定是大家一
起在雨风里摸爬滚打打仗带出来的。
3、建立和匹配有效的物质与精神激励
想让团队成员(特别是小白)被有效激发活
力与责任担当,必须要有相匹配的有效物质激励
和精神激励。对人有效的管理,就是对人性欲望
的有效管理。物质上,必须严格落实“结果和价
值导向”的薪酬奖金等物质激励措施,干得多、
干得好,就一定会有更丰厚的物质回报,要给员
工一种期待:如果你工作输出上有“超出预期的
惊喜”,“那么你的收入回报也会有”超出预期
的惊喜”,通过一次次及时激励,一次次奖金分
配,来不断落实、引导和强化这个理念。另外,
精神层面的有效激励也非常重要,适当且适时的
关心鼓励、荣誉表彰、升职任命等,更能激发人
的深层次的欲望与内驱力,谁都希望自己不断被
肯定和认可,在工作中充满价值感。
1.理解战略业务:24年末,我自己先充分理
解公司的战略业务,然后为对供应链和质量的核
心人员做一次宣讲。确保团队及管理干部深刻理
解公司战略业务的机遇与挑战,最终共同制定出
支撑战略业务实现的措施。
Q1 为了对公司战略业务和客户做出贡献, 您们如何通过专业的工作输出和协作建立受
人尊敬和信任的业务战略合作伙伴关系?
供应链部
张慧敏
2.理解客户需求:各个供应链代表、采购代
表、制造代表,是对客户需求理解及传递的最关
键的人。24年末,他们需要充分理解各BU战
略,然后为对供应链核心人员做宣讲,制定25年
供应链支撑各个BU的经营计划,与BU共识,确
保目标一致,行动统一。
Q2 为了让您的团队有能力当责对结果负责, 您们部门如何走专业化的道路实现把小
白变小黄胜任组织工作不被DQ?
在我看来,与普通的供应商或合作伙伴不
同,战略合作伙伴关系的核心在于有着共同的愿
景和长期目标、可以信息透明相互信任、可以深
度协作、利益共享风险共担。那从品牌和市场推
广角度来说,这就要求我们在思想高度层面与客
户形成共振,并在客户面前成为一个具备独特特
质、区别于其他供应商的存在,具体可能需要通
过精准与责任感、技术领先与持续提升、高效与
协作这三点,结合公司的长期积累与核心优势,
来凸显凌云光独一无二的价值主张。
Q1 为了对公司战略业务和客户做出贡献,您们如何通过专业的工作输出和协作建立受
人尊敬和信任的业务战略合作伙伴关系?
战略与MKT部
柏忍冬
员 工 成 长
知识和理性是我们事业腾飞的翅膀 85
3.解决痛点的专业方案:
1)成本竞争力:
物料成本:再次优化运作“采委会”,现在
这个阶段已经不是采购砍价就能创造竞争力情况
了,牵引PDT共识有竞争力的降本方案。
人工成本:①通过不同BU发展阶段的差异
1.干部管理:“兵怂怂一个将怂怂一窝。”
1)愿意担责:合理的岗位价值评估,落地获
取分享制,激发大家愿意主动担责。
2)有意愿当责:具有以客户为中心的奋斗精
神的管理者甄别。管理者首先要以客户为中心,
特别是中后台,绝对不是职能衙门极为官僚,不
能依赖BU来找我们,我们要主动贴近BU,有机
制就用好机制,没有机制就建设机制,得持续推
动,方式可以多样,温和激进都可以,但绝对不
能让事情掉到地上。其次有奋斗精神,只要不惰
怠,剩下就是靠流程及思想引导行动。供应链25
年会将奋斗精神的标准具象化,然后组织承诺书
签订,后期在AT管理中作为干部的持续激发项。
3)有能力当责:干部轮岗。如果意愿没有问
题,就怕方法或视角限制了他理解兄弟部门及内
外客户需求的能力。干部的轮岗首先是激活干部
队伍,更重要的是培养干部站在不同视角理解组
织运作,不因为本位或视野的局限影响其能的发
挥,最终成为组织的阻塞点。因为这也是我成长
路上收获最多的。供应链25年要落地30%以内的
干部内部轮岗。
4)不敢不当责:干部淘汰。干部能上能下要
用机制管理,及时淘汰末尾干部。人力资源要出
明确的规定,干部淘汰比例及政策。
2.流程建设:供应链流程建设EPROS。L1-L4
流程建设让信息准确、无失误的传递。L5-L6的
工作模板和标准让相同岗位的人员都是一个80分
的输出。不因人员的差异产生巨大的风险。特别
是L5-L6的建设不是一个容易被看到的工作,但
是管理者和核心骨干的职责。23年开始做,24年
再完善,25年优化。
3.信息化建设:MOM建设及与SRM\\WMS的
联通。IT建设会无限降低人为信息传递的错误、
丢失和低效。降低我们对人员的责任心和素质的
要求,实现快速培养。比如原来我们一个几千块
钱的采购追料人员都是交付过程中关键点,天天
对他赋能、培养一点儿用都没有,SRM就让整个
组织提效40%。
4.专业能力素质模型构建:25年构建供应链
的关键岗位的素质模型。准确衡量人员能力短
板,精准赋能、培训、考试。
5.制式的培训与坚决的淘汰:对核心岗位进
行高频培训,实战中考核,不合格就淘汰,调整
到可以担当的岗位继续创造价值。
化组织形式,对标同等规模公司,一人多岗。②
在SRM和WMS建设成功经验的基础上,加快IT建
设步伐,实现人力成本降低。
2)五层架构落地:以五层架构为基础,在工
艺、质量能力上,建立工艺实现能力(SOP)、
质量保证能力(APQP、SIP),确保产品充分实
现设计标准。
Q2 为了让您的团队有能力当责对结果负责,您们部门如何走专业化的道路实现把小
白变小黄胜任组织工作不被DQ?
1)正如“松鼠精神”所强调的,找到品牌
工作的价值和意义。懂得这个道理的同事,往往
会迷失在业务侧牛毛般的需求里,做机械的任务
交付,没有品质可言,最终从小白沦落成小透
明。我们需要通过不断传递公司的愿景与使命,
帮助他们将日常任务与公司整体目标紧密联系起
来,让他们明白自己不要妄自菲薄,自己每一份
用心的努力都是对公司的贡献。
2)持续对标业界优秀的实践,提供工具培
训和传递压力:持续得、更高频得引入业界的最
佳实践,为“小白”提供最新的工具和方法论,
让他们时刻保持行业前沿的视野,并且需要更大
规模和深度的使用AI工具。同时,适当地传递压
力也是必不可少的。没有压力的环境往往让人失
去斗志,因此我们需要设置明确的战略目标,并
让员工感受到适度的紧迫感,确保他们与公司的
长期发展方向一致。
3)让团队成员有饥饿感:这点也是之前做
得很不够的。我们需要有效的激励手段来激发“
小白”的成长动力。小优化必有奖,大项目有大
奖,鼓励更多员工主动担责与创新。同时,那些
持续没有进取心的员工则需要果断淘汰,确保团
队的健康发展。这种饥饿感能够促使员工保持上
进,积极提升自我,为团队带来新的活力。同
时,在员工做出进步时,更加及时予以表彰,让
工作产生心流的同时也有赞美。
1. 在思想高度层面与客户形成共振
其实这个问题之前一直没有深入思考过,也
导致了在日常工作中,内容品质一直存在“缺
陷”。面对像苹果、宁德、比亚迪这样注重创新
与品质的战略客户,意味着我们不仅要提供技术
解决方案,还要展现我们对行业发展的深刻理解
和对卓越追求的共同价值观。
精准与责任感:苹果等客户对产品的每一处
细节都极其苛求,而我们的精准与责任感不仅限
于技术层面,更体现了对产品质量和客户期望的
承诺。我们多年来在质检领域的坚守,代表了对
完美与责任的无限追求,客户可以信赖我们提供
每一项服务;
技术领先与持续提升:这些客户始终站在技
术创新的前沿,他们期望合作伙伴能够与他们一
起引领技术变革。我们公司多年来在技术研发上
的持续投入,以及对未来趋势的准确把握,使我
们成为客户长久以来的技术合作伙伴。我们深知
科技的力量,不断提升技术水准,以保证客户始
终走在行业前沿;
高效与协作:对于客户来说,快速响应和无
缝合作是成功的关键。我们的高效协作精神,体
现在高素质的团队战斗力和风格上;
通过这些思想上的契合,特质上的互相吸
引,将我们的品牌调性与客户形成深刻共振,成
为与他们有共同目标与追求的长期战略伙伴。
2. 打造属于凌云光独特的品牌价值
精准与责任感-->长期积累与凌云精神:将
近30年的行业内的积累与诚信,让客户看到了我
们持久、稳定的价值。相比那些追求短期利润的
竞争对手,我们从不走捷径。我们的责任感不仅
体现为技术上的精确性,还源自几十年来的稳健
发展和对每一个客户的长期承诺。客户可以相信
我们的每一项检测解决方案都经过了多年的实践
检验,并始终保持高标准。
技术领先与持续提升-->专注技术投入与远
见:与其他更重视销售的公司不同,我们以技术
为核心驱动力,持续加大研发投入。这不仅让我
们能够满足客户当下的需求,更能够帮助他们预
见和解决未来的挑战。我们持续在在
VisionWare、大数据中心、量测标准等方面投
入,通过这种远见与持续提升,持续向客户证明
我们不仅是一个技术合作伙伴,更是一个能够陪
伴他们成长的长期战略伙伴。
高效与协作-->高品格与高素质团队:我们
拥有行业内最优秀的员工,他们的专业能力、执
行力和责任心都让我们与客户之间的协作更加顺
畅。我们不是单纯的供应商,而是客户团队的延
伸。相比竞争对手,我们的团队赋予了我们更高
效的执行力和更强的沟通能力,就像F1 车队工程
师与车手的关系,让客户会感受到我们在每一个
环节中的专业与高效。
员 工 成 长
86
4)多担责,多赋能:需要让“小白”有机
会独立承担关键任务。之前怕出问题,不敢让
小白勇敢的走出去,导致小黄越来越黄,小白
越来越白。但小白只有在面对真实问题时,他
们才能真正提高自己。每个员工要对自己的工
作结果负责,这不仅能强化责任感,还能促使
他们快速提升能力,向“小黄”进阶。同时,
让小白敢于承担更多责任,逐步主动在公司内
部多做分享,多赋能,多支持其他部门。通过
成为其他同事的“老师”,能够在教学中巩固
自己的知识,持续成长。同时,鼓励团队与业
务和兄弟部门多沟通,跨部门的协作不仅能帮
助他们更好地理解公司全局,还能在交流中拓
宽思路,提升综合能力。
Q1 为了对公司战略业务和客户做出贡献,您们如何通过专业的工作输出和协作建立受
人尊敬和信任的业务战略合作伙伴关系?
在人际交往的海洋中,信任的航船是靠每一
片小事的帆推动前行的。当他人面临困境,你总
能敏锐洞察,伸出援手,提供精准而有效专业的
帮助与支持。你的建议,如同一剂良药,总能对
症下药,解决他们的燃眉之急。随着时间的积
累,这样的点滴善举将铸就坚实的信任基石。若
再能将过往同类情况的经验与案例倾囊相授,让
对方深知你的建议背后有着坚实的依据,那么,
你的专业形象将更加深入人心。这次nova项目,
公司一遍遍的讲,复盘的前前后后让我触动很
深,也在思考出现这样问题的根因是什么,是大
家不够专业吗?
那么,何为专业?我上网特意查了一下,专
业,是指个人在特定领域内所积累的知识、技能
与经验,是职场成功的密钥。它通过系统的学
习、实践和培训而得。专业,是将单项能力打磨
至极致的艺术。它要求我们将每一件事情做到尽
善尽美,深入挖掘,直至触及本质。人与人之间
的差距,往往就体现在对简单事物的极致追求
上。如何实现这一点?答案是:先确保事情的正
确性,再追求事情的高品质。许多人,在“确保
正确”这一关就已经败下阵来。例如,我所认识
的HR小何,入职半年,连基本的Q12问卷调查数
据统计都漏洞百出,不得不由秀娟重新操刀。这
些看似微不足道的小事,恰恰是专业性的最佳体
现。小事不慎,大事难成。把事情做对的前提,
是深入理解其背后的目的、正确的步骤以及结果
可能带来的影响,而非机械地执行命令,忽视了
工作的价值和意义。Q12问卷统计,绝非简单的数
字游戏,它关乎企业文化的深层次构建。表面工
作的背后,蕴藏着深远的意义,这正是追求极致
的精髓所在。当你将每一件小事都做到精准无误
时,便引发了质的飞跃。此时,你将对自己所从
事的项目、公司乃至整个行业有更为深刻的理
解,从边缘逐渐走向核心,最终掌握全局。
跨过这一关,将进入“把事情做好”的新阶
段,“把事情做好”的关键在于愿意。为何常说
30岁以后的人需警惕被20岁的年轻人超越?并
非仅因年轻人精力旺盛、思维敏捷,更在于心
态。行业在进步,公司要发展。那些在公司“养
老”的人,不愿思考,不愿学习,不愿付出,常
常以60分及格线为标准,而在激烈的市场竞争
中 , 6 0 分的成绩单远远不够。 8 0 分只是起
点,90分尚可拼搏,120分才是我们新的追求目
标。你若做不到,自有他人愿意迎难而上。专
业,不仅是及格,更是不断追求卓越,不断挑战
自我的过程。
在职场中,专业是个人品牌的核心。一个专
业的形象,能够让你在同事中获得尊重,在上级
面前获得信任,在客户面前获得认可。
因此,无论是建立信任关系,还是在职场中
取得成功,专业都是不可或缺的基石。专业不仅
仅体现在大事上,更多的是在日常工作的每一个
细节中。如何提升团队成员的专业性呢:1、深度
学习:深入了解我们的专业领域,不断更新和扩
展知识库;2、实践应用:将所学知识应用到实际
工作中,通过实践来提高解决问题的能力;3、细
节打磨:注重细节,力求在每个小事情上都做到
精准无误;4、持续反馈:积极寻求反馈,从他人
的意见中学习,不断优化自己的工作方式;5、承
担责任:对自己的工作结果负责,遇到问题主动
解决,不推卸责任;6、自我提升:设定个人发展
目标,不断追求自我提升和专业成长。
专业是一种承诺,是对自己职业生涯的投
入,也是对他人和组织的负责。通过专业,可以
成就更好的自己,赢得他人的尊重和信任,最终
实现个人价值的最大化。
监事会
赵欢
员 工 成 长
知识和理性是我们事业腾飞的翅膀 87
秋风送爽,丹桂飘香,随着秋意的渐浓,我们凌云人的活力也在这个季节里绽放。为了丰富大家
的业余生活,凝聚团队的力量,公司在京沪深等地成功举办了2024年秋季社团运动会。本次运
动会的主题是“与光同行,趣享运动”,吸引了数百名员工的热情参与,涵盖了羽毛球、乒乓球、微型
马拉松等多项赛事,上百人次同事投入其中,共同体验运动的乐趣。
在这次微马赛中,我们鼓励大家挑战自我,跑出你的5公里,全国各地的同事积极参加。参赛者们
不仅在社团群里积极分享自己的跑步心得,更在比赛中展现了坚韧与毅力。无论是赛前的紧张筹备,赛
中的奋力拼搏,还是赛后的深刻反思,每一个瞬间都凝聚成了一个个有趣而鼓舞人心的故事。这些故
事,是我们共同的记忆,也是激励我们前行的力量。
感谢每一位同事的
积极参与,让我们以微
马赛为起点,携手同
行,共同创造更加灿烂
的明天!让我们一起,
在运动中寻找快乐,在
挑战中成就自我,在团
队中凝聚力量,向着更
加美好的未来迈进!
感谢大家的热情参
与,让我们以微马赛为
契机,携手并进,共创
更加美好的未来!
88
生活空间
LIFE
LIFE
生活空间
版主寄语 / 张芳芳
与光同行,趣享运动
生活空间
LIFE
知识和理性是我们事业腾飞的翅膀 89
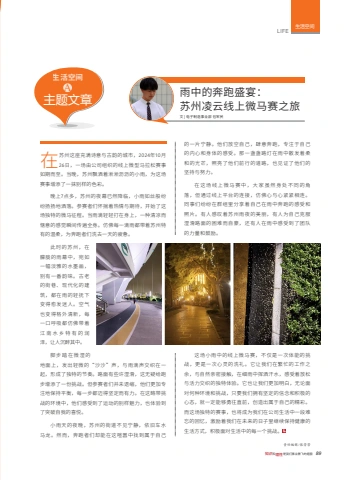
在苏州这座充满诗意与古韵的城市,2024年10月
26日,一场由公司组织的线上微型马拉松赛事
如期而至。当晚,苏州飘洒着淅淅沥沥的小雨,为这场
赛事增添了一抹别样的色彩。
晚上7点多,苏州的夜幕已然降临,小雨如丝般纷
纷扬扬地洒落。参赛者们怀揣着热情与期待,开始了这
场独特的微马征程。当雨滴轻轻打在身上,一种清凉而
惬意的感觉瞬间传遍全身。仿佛每一滴雨都带着苏州特
有的温柔,为奔跑者们洗去一天的疲惫。
此时的苏州,在
朦胧的雨幕中,宛如
一幅淡雅的水墨画,
别有一番韵味。古老
的街巷、现代化的建
筑,都在雨的轻抚下
变得愈发迷人。空气
也变得格外清新,每
一口呼吸都仿佛带着
江南水乡特有的润
泽,让人沉醉其中。
脚步踏在微湿的
地面上,发出轻微的“沙沙”声,与雨滴声交织在一
起,形成了独特的节奏。路面有些许湿滑,这无疑给跑
步增添了一份挑战。但参赛者们并未退缩,他们更加专
注地保持平衡,每一步都迈得坚定而有力。在这略带挑
战的环境中,他们感受到了运动的别样魅力,也体验到
了突破自我的喜悦。
小雨天的夜晚,苏州的街道不见宁静,依旧车水
马龙。然而,奔跑者们却能在这喧嚣中找到属于自己
的一片宁静。他们放空自己,肆意奔跑,专注于自己
的内心和身体的感受。那一盏盏路灯在雨中散发着柔
和的光芒,照亮了他们前行的道路,也见证了他们的
坚持与努力。
在这场线上微马赛中,大家虽然身处不同的角
落,但通过线上平台的连接,仿佛心与心紧紧相连。
同事们纷纷在群组里分享着自己在雨中奔跑的感受和
照片。有人感叹着苏州雨夜的美丽,有人为自己克服
湿滑路面的困难而自豪,还有人在雨中感受到了团队
的力量和鼓励。
雨中的奔跑盛宴:
苏州凌云线上微马赛之旅
文 | 电子制造事业部 包军民
这场小雨中的线上微马赛,不仅是一次体能的挑
战,更是一次心灵的洗礼。它让我们在繁忙的工作之
余,与自然亲密接触,在细雨中挥洒汗水,感受着放松
与活力交织的独特体验。它也让我们更加明白,无论面
对何种环境和挑战,只要我们拥有坚定的信念和积极的
心态,就一定能够勇往直前,创造出属于自己的精彩。
而这场独特的赛事,也将成为我们在公司生活中一段难
忘的回忆,激励着我们在未来的日子里继续保持健康的
生活方式,积极面对生活中的每一个挑战。
责任编辑/张芳芳
主题文章
A
生活空间
90
生活空间
LIFE
还记得凌云光Isport社团的第一届微马赛是2016
年,那时我们社团刚成立,第一次跑步活动,
目标是5.2KM,和办公室的小伙伴一起奔跑,那是我第一
次开始跑步,也是这样一个契机我开始了跑步,回想起
来跑步已经有8个年头,我们的社团也8岁啦!
今年的微马赛,犹如昨日重现。这次比赛,作为秋
季运动会的一部分,我们需要完成目标公里数同时也希
望激励大家挑战完成自己的5公里PB,日常活动打卡已
经很多了,借这次活动来检验自己的成绩,挑战自己的
最快速度!于是,我们设置了奖牌激励,配速达6分配
以内,30分钟内完成由于这次比赛的将获得精英跑者的
奖牌。这是线上比赛,考虑到大家都是全国各地分散,
周日休息的时间也有限,为了便于大家安排运动时间,
我们分为了晨跑组和夜跑组。我们经过两周赛前宣传,
最终有25位跑着报名了晨跑,41位报名了夜跑。
最后,我们的活动如期进行。在比赛的前一天,来
自苏州的小伙伴播报,26号可能会下雨,为了大家安全
起见,我们建议安全第一,如果不适合跑步可以放弃,
凌云光微马赛有感
文 | 行政管理部 张芳芳
果然,才二十多分钟,已经就有同学跑完了,配
速6分内的大神起飞后根本停不下来,很快,伴随着一
大波数据图片,群内陆陆续续又有一大波同学完赛的
数据刷屏,大家纷纷发表了自己跑完步的感受,北京
的重度雾霾下,咱们的运动员还坚持跑完了五公里,
有的同事本来打算6分配结果一兴奋跑到了5分半,都
完成了自己的五公里PB,当然也有最开始冲太快太狠
了,后面降速下来的,但是大家不论成绩如何,都完
成了目标任务。
晚上7点,夜跑组的大部队开始,夜跑组有四十多
位同学,有的在黑灯瞎火的马路,有的在小区里绕圈
圈,有的在跑步机上,有的甚至是冒雨,大家都各自
克服有限的运动条件,努力达成运动目标。随着夜色
的渐渐深,我们的比赛也落下帷幕。然后最后一位同
事,在十点多的时候还交来一份答卷(因为办事耽搁
了10点多才能出去跑步),非常不易。运动无论何时
起步都不算晚。
后期我们还会有更多活动。到了第二天,比赛当天,一
大早,苏州的健将就开始播报在小雨,得抓紧跑完。我
们在线教学热身和拉伸动作,做到运动不损伤的前提下
跑步,小伙伴们的热情似火都快按耐不住了,7点,我
们和各地的小伙伴赴约隔空准时出发!
生活空间
LIFE
知识和理性是我们事业腾飞的翅膀 91
最终,晨跑组和夜跑组一共66有位同事参与,其中晨跑组完赛22名,夜跑组完赛
29名。其中配速4分-5分的运动员有:李强4'08、胡宇华4'56、夏攀4'56、黄小丽4'57
、曹智勇4'58,他们以绝对的速度遥遥领先,配速5分-6分的运动员有:胡华伟、朱玉
龙、姜军伟、戴志强、顾晓伟、李鑫、石磊、郝浩、王忠祥、包军民、刘广月、李
磊、朱文强、马硕、田福源、谷灵丽、刘汕湘、王学良、宋磊、樊立博、岳扩明、王
祖文、张芳芳、宫文奎等以上30位跑者跑进了6分,在30分钟内完成了五公里挑战,拿
到的精英跑者奖牌!另外张元、陈文、何三孩、杨金杰、任云云、张浩、杨瑞龙、刘
鹏、黄玲、王珏、肖京、陈佳妮、肖叶唯、韩霜、王玉莹、吴堃正、马瑞、常吉祥、
李玮琪、王胜洋、刘玉琨,他们在
天气不佳的情况下顽强拼搏完成了
跑步任务!
51位完赛的同事他们分别来自
北京15位,苏州16位,武汉6位,
上海6位,郑州4位、潍坊3位,西
安1位,深圳1位。
我们的凌云光微马赛圆满结
束!这次比赛,让我们见识了原来
我们中潜藏着那么多优秀的跑者,
天气恶劣的情况下能顽强拼搏,坚
持完赛,更涌现出一大批优秀的速
度选手,以及几位长文记录分享了
跑步的心路历程,感触颇多引发共
鸣,初跑不易,坚持下去更不易!
致敬!还有因为种种原因未完成比
赛的同学也不要气馁放弃,怀揣着
健康运动的初心勇敢的迈出步子
吧,踏出的每一步都算数。人生的
马拉松很长很长,犹如一次又一次
的微马赛组成,让我们在每一次奔
跑都不惧风雨困难勇往直前,让我
们一起期待下一次微马赛!
责任编辑/李婷
92
生活空间
LIFE
放弃前,请再挣扎一下
再坚持一下
文 | 电子制造事业部 朱玉龙
近日,公司组织了一场线上微马(5公里
跑步)运动会,我平时也有跑步的习
惯,所以一听说比赛,就马上报了名参加。比赛
规则很简单:完成比赛即可获得参与奖(奖品是
运动水杯),若30分钟内完赛,还能额外获得一
枚奖牌。我觉得对我来说30分钟5公里,肯定“
洒洒水”(小事情,轻而易举),开跑!
所以我这次跑步比赛是要突破一下自己极限的,最重要的是,
我自信能赢。
我很喜欢在家里的老城体育场跑步,它虽然建成年代比较
久,平常人也比较多,但是有一点,地面硬化很不错,跑起来很
舒服。还有另外一点,体育场下面就是胖东来超市,在体育场跑
步的另一个巨大好处就是,如果一个人来,也不用担心东西没地
方放,超市的柜子可以存放物品,甚至还提供免费的水和零食,
所以在这里跑步少了很多后顾之忧。
运动礼品
平时我的跑步配速通常保持在每公里6分钟
内,但是这次跑步和往常不一样,对我来说这
个是比赛的性质,是比赛,就有输赢,我这个
人对于比赛的态度就是全力以赴,要“赢”!
跑步前先热身,今天的目标不一样,所以得好好准备。
热身完成,开跑。
刚开始的1公里还算比较轻松,因为要注意跑步时间,所以
跑的速度明显比之前快的多了,两圈半过后,软件报时5分钟
整,这时候心里却咯噔了一下:按照预期,这个速度应该稳稳
在5分钟内,但是实际上刚刚已过5分钟,我意识到我过于自信
了。这次的挑战没有想象中的那么简单。
随着比赛的进行,后面压力陡然大了起来,步伐也开始沉
重。此时,体育场的人也越来越多,跑起来需要不停地变道,
让跑步变得不那么痛快。
生活空间
LIFE
知识和理性是我们事业腾飞的翅膀 93
终于跑了2公里了,软件报时10分钟,速度倒是没降下来,但是感觉
跟跑了4公里一样,啊,好难啊!
心里有点慌乱,感受了下身体,好一点是呼吸节奏没乱,也没有肚
子疼、抽筋等不良反应。还可以,加油,调整心态,把精力放在调整呼
吸和躲避障碍上,继续,继续!
3公里过半,越发累了,怎么办,想放弃了,每一步都是煎熬,平时
3公里都没什么太大感觉,现在竟然想放弃了,呼吸也变得急促,已经顾
不得跑完嗓子疼、咳嗽等不良反应,想跑完,得牺牲一些东西了。
话虽如此,脚下的路还需一步一步跑完。心里不停地想:到极限
了,是放弃目标让自己缓一下,还是继续坚持战胜自己?
在纠结与挣扎中,想起了最近看到的新闻:中国的战士们日常锻炼
的艰苦场景,他们为了国泰民安,不断刷新自己的极限。相比之下,我
这挑战又算得了什么呢?于是,继续坚持。
当跑到3.5公里时,速度已经明显感觉降下来了,不行了,战士们也
拯救不了我了,但终点近在眼前,我脑海里就剩下一个声音:坚持,再
坚持一下。此时又想起来《一拳超人》动漫里的主角琦玉老师凭借自己
的努力,突破了限制器,获得了不凡的力量。而他之所以能成功,就是
在于坚持,他虽然锻炼任务不多(每天10公里跑步、100个俯卧撑、100
个深蹲),但是贵在坚持,不管什么天气,什么状态都坚持完成。所
以,我要想不带遗憾完成,就得坚持,不然今晚得后悔。
终于,最后1公里了,但此时心里想的却不是再坚持坚持就结束了,
而是开始退而求其次,最后一公里是走还是跑?从时间来看,就算走完
最后一公里,也能在30分钟内完成比赛。内心斗争激烈。
回顾此次跑步比赛,酣快淋漓!我想到了
很多行业的人们,尤其是运动员,为国争光让
国旗升起的背后,付出了多少难以想象的努
力,可应该也是同样地,挣扎中不断前进,最
后突破自我,获得了荣誉。
在我们日常生活或者是工作中,面对困
难,总会有很多想放弃的时刻,但是请在放弃
之前,再挣扎一下,再坚持一下,或许就能看
到胜利的曙光。
责任编辑/张芳芳
但是走完就会有遗憾啊,就不完美完成
了。如果这样结束了,那我会怎么看待我今天
的成绩?以后我还能再刷新极限吗?我想要的
是完美收官,还有2圈跑道,加油,我努力调
整呼吸,坚持坚持,挣扎中前进吧!
终点就在前方,要成功了,心里莫名的激
动,感觉又有力量了,觉得能冲刺一下了。不
能浪,越到最后越得稳住,最后100米,最后
10米,哈哈哈,笑着冲过终点,5公里,顺利
完成,赢了。
94
生活空间
LIFE
远离不健康的舒适圈
文 | 电子制造事业部 吴堃正
当我尝试专注于呼吸与脚步声的时候,才发现自己的喉咙仿佛
被紧紧掐住。明明我大口呼吸那随处可在的氧气,窒息感却
将我紧紧包围,这一刻,我对自己感到前所未有的陌生。
回忆如潮水般涌来,还记得在2022年,在同事朱文强的带领下,
我重新拾起了荒废多年的跑步习惯。那时的我,还是个160斤的小青
年,这个体重在当时对于我来说还不算胖,因为我有着188cm的身
高,这使我看起来充满年轻人特有的朝气与活力。在朱文强强哥的鼓
励下,我慢慢从跑三公里的气喘吁吁,逐渐进步到能一口气跑完十公
里。常言道:“好汉不提当年勇”, 虽那时的成就也称不上十分英
勇,但如今回想起来,只觉甚是可惜未能坚持。倘若能坚持下来,定
能收获一个截然不同的自己,如今悔恨交加。在生活之中,这样的例
子比比皆是。朱文强强哥可谓是我生命中难得可贵重要的的“转型导
师”,而我却没有跟紧他的步伐。
回想那段充满汗水与坚持的美好时光,身体与精神皆处于一种充
盈饱满的状态。然而,随着一次次的懈怠,找各种理由借口,那一段
辛苦的付出最终付诸东流。各种不健康的习惯
如同蛀虫,开始悄无声息地侵入我的生活,经
常暴饮暴食,不上班休息的时候可以睡到下
午,吃饱了床上一躺好不惬意,沉迷在舒适的
环境下无法自拔。看着自己的体重以十斤为单
位慢慢的向上攀升时,心里的想法是自我安
慰:“减肥还不是手到擒来,到时候多运动运
动就好了”。从200斤到208斤,我才惊觉,这
种畸形的舒适就像隐藏在暗处的魔鬼,温水煮
青蛙一般,不知不觉将我推向深渊。
其实在这场公司举办的微马比赛之前,我
的心中已经冒出了要运动的想法,但不知道要
磨叽多久才会真正行动起来,也会以各种理由
拖延,比如“天气太冷了,来年天气回暖了在
运动吧”……
经过此次跑步比赛,及时敲醒了在装睡的
我,让我认清了自己的状态。从小处着眼,这
看似只是跑步的问题;从大处审视,我的健康
已然出现了状况。跑步的过程虽然痛苦,但是
大汗淋漓后的畅快也是无价之宝。洗去一身疲
惫,躺在床上的那一刻,全身细胞都在欢呼愉
悦。整个人也是元气满满,这才是我们真正需
要的舒适。我也深知,跑步如逆水行舟,不进
则退。它需要我持之以恒地坚持下去,不能再
重蹈覆辙。
为了健康的身体,我下定决心要坚定不移
的坚持下去,必须要远离那些不健康的舒适
圈。就像姚博士所说的“种一棵树最好的时间
是十年前,其次是现在”。仅以此篇勉力自
己!要迈向更健康的生活。 跑步比赛数据及跑步留念
(左:朱文强,右:我)
生活空间
LIFE
知识和理性是我们事业腾飞的翅膀 95
生活随笔
B
生活空间
封神的播客推荐
——《岩中花述》
文 | 行政管理部 葛玉婧
压。“男人要出人头地”的历史遗留观点,其实也
一直在压迫男人,而女性主义在解放女性的同时,
也在解放男性。
鲁豫跟思文的对话就充分展示着女性主义,她
们自由的表达、真诚的探讨,两个不同行业、不同
爱好的人,彼此交流且尊重各自的观点,女性力量
就此生根发芽。思文说:“人生就是一场造物主设
计的游戏,我们的目的不应该只是通关,我指的通
关是升官发财、出名、家庭美满等社会标准的通
关,而是在世界这个大地图上,经历常人没有经历
的事情,搜寻不一样的感受和礼物。”去探索吧,
脚步丈量世界也好,眼睛汲取知识也罢,造物主在
触手可及的角落藏满了礼物,就看你能找到多少。
3.S6E9《鲁豫对话陈果 | 命运无常,我有常》
你可能不认识陈果,但你一定在社交媒体上刷
到过一位温柔的哲学老师,在课堂上频爆金句,她
就是上海复旦大学的哲学女博士。陈果的声音是加
了魔法的,3分温柔、3分平静、4分感召力。是的,
感召力。听她讲话我会不由自主在心里跟读,而且
声情并茂,代入感极强。
她说:“每个人都有权力不优秀,每个人都只
是正常人,每个人身上都有缺点,活成正常人感觉
太好了,活得真实感觉太痛快了!”人生有很多种
选择和可能性,我们不需要给自己框套在大众的社
会标准中,多用哲学的视角看待世间万物,不伪
装、不美化、不虚构。做好当下的选择,累积经
验,当新的经验注入生命,就长出了新的自己。
长路漫漫,愿我们都能长成正义勇敢、安全感
满满的女孩子。
责任编辑/李婷
每天早上的播客时间,现在都留给了《岩中花述》,
篇篇听、篇篇爱、篇篇惊艳的对话,是我开启一整
天的能量包。来自文学、影视、音乐、哲学、教育、法律等
各个行业的女性群像,在此交汇,她们用自己坦诚的表达,
为更多女性打开视野,提供人生更多可能性的参考。摘出3
期很喜欢的部门分享给大家。
1.S2E1《对话邵艺辉、滕丛丛 | 女导演的解放日记》
电影《好东西》是邵艺辉编剧+导演的第二部作品,好
评如潮,让女性们拾起女性力量的大旗,让男性们开始研究
女性主义的书籍。她第一部编剧+导演的作品《爱情神话》
更是有口皆碑,首秀就拿下第2届金榆花奖最佳编剧奖、第
35届中国电影金鸡奖最佳编剧。邵导的身上始终有种“自
由”“独立”的东西,不屈从也不盲目乐观,以贴近女性主
义的平视视角展开生活的思考,简单来说,就是看她的作
品,极度舒服。
邵导说:“要勇敢,不要被别人定义。失败是一个非常
常见的事情,不要惧怕它。人生当中你做十件事情有九件是
失败的,很正常。但你那一件成功了,别人就只记得你这个
成功的一件事情。”所以,勇敢的去经历,去试错,世界这
么大,时间那么长,你擅长的那么多!
2.S3E4《鲁豫对话思文 | 好看的女人不可能无聊》
思文是我很喜欢的女脱口秀演员,敢于把自己的悲惨
解剖,加工成喜剧段子,再晾晒给大众,这是一件少有女
性敢走的路。而在思文之后,脱口秀的赛道又多了很多女
性声音。
值得一提的是,女性主义并不是女权主义!女性主义是
给女性提供一种选择,而不是去棍棒鞭打所有女性进入到一
种框架中,女权主义是“我不要你觉得,我要我觉得”的强
96
生活空间
LIFE
跟随“团建”,感受红旗渠精神
文 | 电子制造事业部 朱玉龙
“自力更生,艰苦创
业,团结协作,无
私奉献”,这十六字凝聚了红旗渠
精神的精髓。我对红旗渠的最初了
解到红旗渠,还是在2007年电视剧
《红旗渠的儿女们》,虽然是一部
偏爱情类的电视剧,但是红旗渠的
精神贯穿始终。从那时候起,红旗
渠这三个字就深深刻在了我的心
里,久久不能忘记,并对其产生了
深深地向往。如今,有幸跟随公司
团建活动,去到了这期待已久的圣
地,亲身体验,深刻感悟!
在导游小梁的引领下,我们首
先参观了红旗渠纪念馆,这里汇聚
了红旗渠建设的历史脉络,展现了
建渠过程中的感人事迹和劳动工
具,令人震撼,由衷敬佩。
难以想象,在那个物资匮乏的年代,劳动人民是如何凭借智慧和勇
气,攻克重重难关,创造出这样的奇迹。没有路,他们开出路;没有
人,他们全员上阵,众志成城,无私奉献。
从1960年2月开工,到1969年7月支渠配套工程全面完成,红旗渠
工程历时十年,终成通水。期间,涌现出无数英雄人物,其中最让我感
动的是除险英雄任羊成。在一次除险中,他被滚落的石块击中,四颗牙
齿被砸松动,鲜血淋漓。为了继续工作,他硬是用钢钎将牙齿拔出,继
续在悬崖上作业。正是这种无私奉献的精神,铸就了红旗渠的辉煌。
生活空间
LIFE
知识和理性是我们事业腾飞的翅膀 97
如此辉煌工程,最激动的莫过于通水的那一刻。纪念馆
工作人员在介绍这一刻时,激动之情溢于言表。上图右侧有一
些拿着证书的人员,是优秀人员的代表,最小的才19岁,却已
在此奉献了7年。但愿苍生俱饱暖,不辞辛苦出山林。我想此
刻少年的心中满满都是以后庄稼丰收,生活美满的畅享。
参观完纪念馆,我们来到了红旗渠实地,亲脚踏上这片
土地,目睹这一伟大工程。在享受现代生活便利的同时,我
们不禁感慨国家的强盛和人民的伟大。海底隧道、峡谷高速
公路,这些都是中国人民自力更生、拼搏不息精神的体现。
如今,红旗渠不仅仅是一座水渠,更是一种精神,一
种信仰,指引后代的我们奋发图强,在美好生活中不忘初
心,努力拼搏,为以后的美好生活奋斗!今天,红旗渠已
不仅仅是一座水渠,它更是一种精神象征,一种信仰力
量,激励着我们奋发向前,不忘初心,为更加美好的生活
而努力拼搏。
责任编辑/李婷
98
生活空间
LIFE
青春在不经意中流逝,一眨眼已是沧海桑田。朗朗
的书声在记忆里回映,匆匆的岁月在时光中定
格。君子湖畔的杨柳依旧如新,而曾经在那挥洒青春、追
逐梦想的人却已不复存在。
记得那年高考时,丹桂荫蔽,樟叶飘飞,沉郁的天压
得让人喘不过起来。每个人脸上挂着忧虑,每个人心里带
着紧张,每个人眼里期待着解放。纵笔间,成败轻泄于纸
上,命运执掌于纤毫。在这无形的疆场,一场筹谋已久的
战斗即将上演最残酷的厮杀。
黑云压城,郁气氤氲,窗外的蝉鸣得格外凄彻。一声
铃响,蜂拥而至,只见独木桥边嘶声惨烈,哀嚎连天。弹
指间,霸王别姬,英雄末路,垓下孤城一片狼藉,乌江水
岸血洒空碧。四面楚歌,枯心肠断,江东子弟泪流沙场,
已无颜再见江东父老……
记得那年高考时,晓风残月,杨柳依依,柔和的晚风
吹醉了离人的绮梦。心中的那一湖静水泛起涟漪,此起彼
伏,轻拍着柳岸。荧光灯下清颜素雅;生花笔里,春情荡
漾。杨柳岸,暖风吹来,君子湖似那娇羞娉婷的青女,舞
动着最美的娇姿。石桥上,明月下,琥珀光华滑落人间,
让他们在最美的华年里,演绎着最美的梦。
一笺素纸,一行小词,一片闲愁,惹得无数少年魂牵
梦绕,惹得多少豆蔻痴迷不返。曲终人散去,花落梦还
香。那静谧的夜里飘散着人间凄曲,那缤纷的柳岸记忆着
无悔的青春。
记得那年高考时,纸屑纷飞,人流蹿动,离别的歌声
弥漫天际,含愁的笑语久溢桂亭,一张张笑脸定格在那封
尘的相册,一句句真心的语录记录着那纯真的友谊。寒窗
三年,承载着最美的年华,刻印着人生中最纯洁最诚挚的
岁月。
岂是离别不知愁,纵有离愁难诉口。饭堂里,霓光闪
烁,纵酒高歌,相顾无言,两行泪下。三年来积怨的满腹
闲愁,在这最后相聚的一夜全然吐露。从今以后,何去何
从,已不在是魂牵梦绕的事,而命运如何安排也已由天
定。人生聚散,淡若萍水,浓似醇酒。
日子总是像从指尖流过的细沙,在不经意间悄然滑
落。那些往日的忧愁和悲伤,在似水流年的荡涤下随波轻
轻地逝去,而留下的欢乐和笑靥就在记忆深处历久弥新。
重回首,已流年,揽尽风雨苦亦甜。多少次寻着记忆的气
息误入梦的缝隙,看见昔日的痕迹。泛黄的日记里,写满
了雾的飘逸,烟的渺茫。风轻花落定,时光踏下轻盈的足
迹,卷起昔日的美丽悠然长去。
记得那年高考时,相对无言苦岁驰。而今高考年年
复,相忘江湖不相知。
记得那年高考时
文 | 信息化部 薛路通
责任编辑/李婷
【七律·忆高考感作】
十载寒窗书建楼,无缘折桂亦悲秋。
灯残映月难轻进,室陋偷光枉自筹。
花坞愁浇今仕绝,柳泉笔罢此生休。
龙门鲤跃哭东野,何盼朱衣暗点头?
【五律·寄高考学子】
苦日今熬过,还须纵笔挥。
静心功可就,浮躁梦成灰。
命运凭君改,前程莫怨谁。
逸劳终不负,愿尔载名归。

